斜率优化 & 多项式入门
作者:互联网
\(\Large \text {斜率优化}\)
前置芝士:单调队列优化的\(DP\),平面直角坐标系,一次函数,可能需要的线性规划思想。
我们设\(dp_i\)为处理到\(i\)时的最小费用,\(S_i=\sum_{k=1}^i c_k\)则有:
\[dp_i=\min_{0\le j<i}\{dp_j+(S_i-S_j)^2+M\} \]将其展开,得到:
\[dp_i=\min_{0\le j<i}\{dp_j+S_i^2+S_j^2-2*S_i*S_j+M\} \]\(\min\)很烦,将其去掉,顺便将只有\(j\)的项移到一边,剩下的放一起。
\[dp_j+S_j^2=2*S_i*S_j+(dp_i-S_i^2-M) \]仔细观察这条柿子,将与\(j\)有关的看作变量,其他的视为变量(因为在我当前这个状态,\(i\)是已知的),像不像一次函数\(y=kx+b?\)
现在我们构建一个以\(2*S_j\)为横坐标,\(dp_j+S_j^2\)为纵坐标的平面直角坐标系: (下文以\(X_j\),\(Y_j\)代替)
而每一个点\((X_j, Y_j)\),都在这上面。
每个决策\(i\)所对应有个斜率\(S_i\)
可以知道,我们如果选取点\(k\)的话,只要将我们当前的直线\(f(x)=S_i*x+b\)向上平移,即可得到一个截距\(b=dp_i-S_i^2-M\),所以当\(b\)去到最小值时,\(dp_i\)就取到最小值。
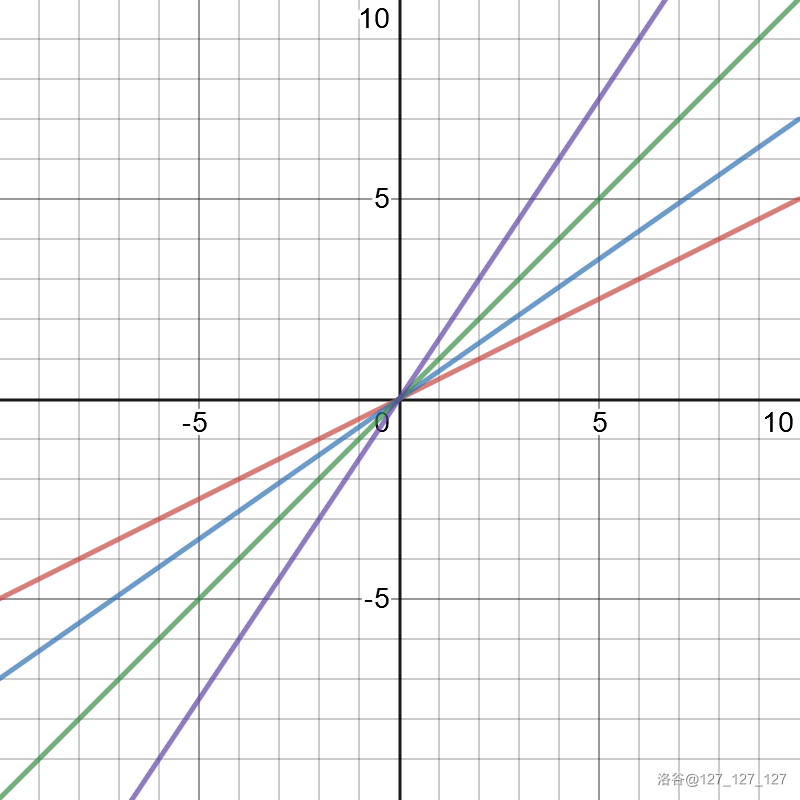
每条直线所对应的斜率:\(Purple:1.5\ Green:2\ Blue:0.75\ Red:0.5\)
考虑维护一个单调队列,这个队列要满足什么呢?
由于一堆点的操作比较难弄,我们考虑三个以内的点的操作。
从对头入手:
令队头为\(q_h\),队里第二个元素为\(q_{h+1}\),则使得队头\(q_h\)不优的条件为:
\[dp_{q_h}+S_i^2+S_{q_h}^2-2*S_i*S_{q_h}+M \ge dp_{q_{h+1}}+S_i^2+S_{q_{h+1}}^2-2*S_i*S_{q_{h+1}}+M \]删去无用的:
\[dp_{q_h}+S_{q_h}^2-2*S_i*S_{q_h} \ge dp_{q_{h+1}}+S_{q_{h+1}}^2-2*S_i*S_{q_{h+1}} \]①
移项,换元,得:
\[\frac {Y_{q_{h+1}}-Y_{q_h}} {(X_{q_{h+1}}-X_{q_h})} \le S_i \]接下来以数、形两种角度介绍为什么可以这么干。
数学上很好解释,看回①,\(q_h\)对\(i\)的贡献不如\(q_{h+1}\),那么它以后都没用了,排掉。
再从形上讲:
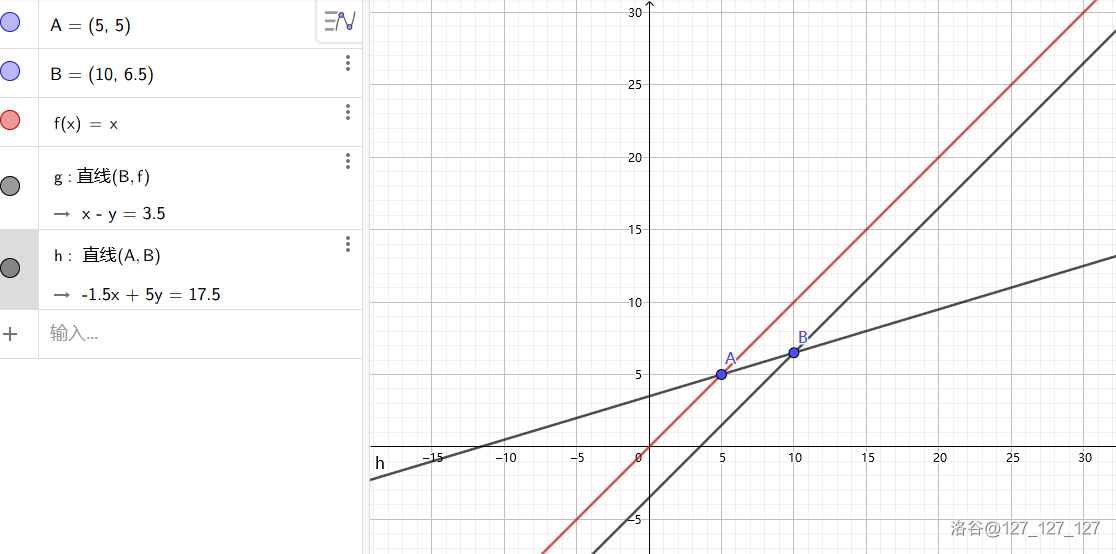
\(RT\),\(A\)为\(q_h\),\(B\)为\(q_{h+1}\)可以看到,如果直线\(l_i\)平移到\(A,B\),会与\(y\)轴产生两个交点,如果直线\(AB\)的斜率\(k_{AB}\le 2*S_i\),即图中的情况,那么\(q_h\)是没用的。
你的脑瓜子就会想出一个问题:
那它会对后来的\(i\)产生贡献啊!
再次回看这条直线的斜率:\(S_i=\sum_{k=1}^i c_k\),因为问题中的\(c_i \ge 0\) 所以\(S_i\)非严格单调递增。
即:
这条直线只会越来越斜。
那我们把线变斜一点试试:
可以看到,无论怎样,斜率单调不降直线集合\(l_i,l_{i+1}...l_n\),平移至\(A\)的截距永远都比平移至\(B\)的截距要大,也就是说,\(dp_i,dp_{i+1}...dp_n\)在这个决策点上永远取不到最优答案,那么我们就可以\(pop\)掉这个点了。
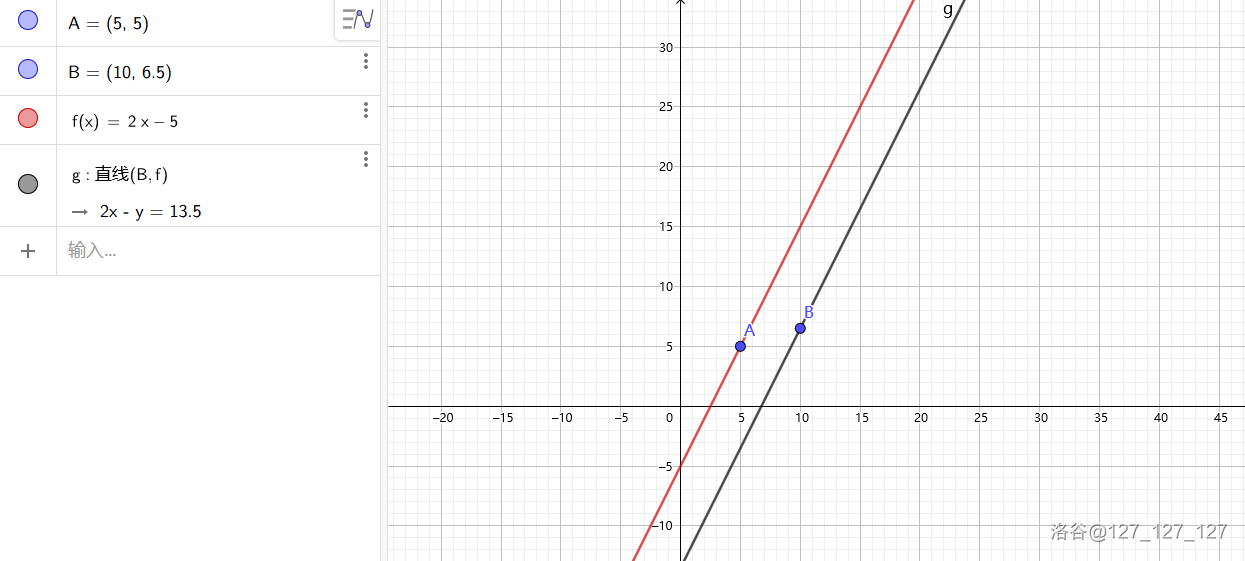
再看队尾?
考虑加入当前决策\(i\)会出现的情况,

\(RT\),\(A\)为\(q_{t-1}\),\(B\)为\(q_t\),\(C\)为\(i\)。
当上图情况出现时,即直线\(AB\)的斜率\(\ge\) 直线\(BC\)的斜率,\(q_t\)不优。
我们看直线\(f\),这条直线表明了\(q_{t-1}\)还有救还能用,直线\(g\)表示\(i\)有用,自己yy 手玩 动脑筋想一下\(B\)绝不会被我们用到(因为在任意情况下\(A\)、\(C\)都至少有一点比\(B\)优),所以该点也可以\(pop\)掉。
整个\(dp\)过程:
\(for\ each\ i\ \in n\)
\(\ \ \ \ \ while(q.szie()>1\ and\ Slope(q_{h+1},\ q_h) \le S_i)\ h++\)
\(\ \ \ \ \ dp_i=...\)
\(\ \ \ \ \ while(q.szie()>1\ and\ Slope(q_{t-1},\ q_t) \ge Slope(q_t, i))\ t--\)
\(\ \ \ \ \ end\)
其中\(Slope(i,\ j)\)为斜率计算公式,有时为了精度问题,还会用交叉相乘。
\(\Large Ques:\)
\(\large \text {斜率优化的作用?}\)
当然是优化时间复杂度了,因为每个点最多入队一次,所以总时间复杂度是\(O(n)\)的。
课后作业:
P5785 P3195 CF311B P2120
\(\Large \text {多项式}\)
咕咕咕。
标签:Slope,直线,le,入门,多项式,斜率,ge,dp 来源: https://www.cnblogs.com/sizeof127/p/14614502.html