离线模式(Offboard)
作者:互联网
https://zhuanlan.zhihu.com/p/43985306
无人机初级篇系列第 15讲:飞型模式
三、位置模式 / 定点模式(Position / Hold)
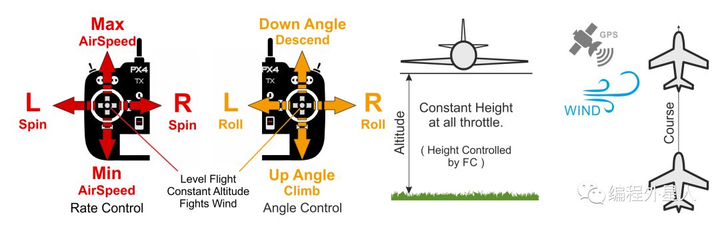
位置模式在油门控制方面与高度模式相同,都是可以保持定高飞行,而在水平飞行方面位置模式下,遥控器的滚转和俯仰通道控制的飞机的前后飞行和左右飞行的速度。也就是说当遥控器的滚转和俯仰通道在中心位置时,飞机会在当前位置上保持不动,也就是在三维坐标系下的xyz坐标不变。这也就与Hold模式是相同的功能。这通常需要全球定位系统GPS的支持,如果没有GPS的定位,无人机将无法进入位置模式。当然,有条件的读者也可以使用其它传感器来实现无人机的定位,例如在室内的动作捕获摄像机,或无人机自身的多目摄像头等等。
参数说明:
MPC_HOLD_DZ 在滚转和俯仰通道偏离中心位置小于阈值时为Hold模式,即保持当前位置不动,默认值为:0.1(即10%)。
MPC_VEL_MANUAL 水平飞行速度最大值,默认值: 5 m/s。
四、任务模式(Mission)
五、起飞模式 / 降落模式(Takeoff / Land)
起飞机模式与降落模式即为一个相对独立的飞行功能,可以实现一键起飞和降落,我们只需要对其参数做一些说明即可:
MIS_TAKEOFF_ALT 起飞高度,到达此高度后悬停,默认值为:2.5m
MPC_TKO_SPEED 起飞速度,在起飞模式下上升的速度,默认值为:1.5m/s
MPC_LAND_SPEED 着陆速度,在降落模式下下降的速度,默认值为:1m/s
COM_DISARM_LAND 着陆后多久自动锁定电机,默认值为:0.5s
离线模式指的是无人机可以在脱离遥控器控制的情况下离线飞行,但前提是需要有地面站指令(目前PX4采用的是Mavlink协议与地面站通讯)对飞机进行控制。在此模式下,地面站对无人机的控制指令比较简单。例如:起飞、悬停、执行预设任务、指定目标点飞行、返航、着陆等等。
参数说明:
COM_OF_LOSS_T 数传信号丢失时间,默认值为10s
COM_OBL_ACT 数传信号丢失后,保护动作:0:着陆,1:定点,2:返航
COM_OBL_RC_ACT 数传信号丢失,但遥控器信号正常,切换模式,1: 高度模式, 2: 手动模式, 3: 返航模式 , 4: 着陆模式.
六、返航模式(Return)
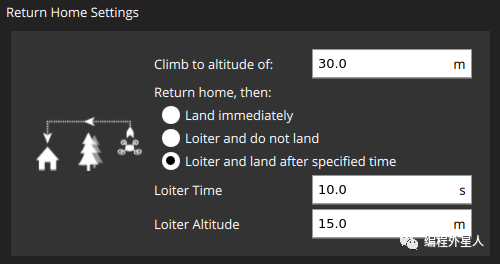
返航模式是一个安全保护模式,它允许无人机在紧急情况下切换到返航模式,并返回到起飞点(Home Position),返航模式一共有有5个阶段:
1.爬升:上面图解已经表示的很清楚了,飞机在返航前为了避免与中途的障碍物发生碰撞,所以在返航前通常都是要爬升到指定的高度。
2.返航:向起飞点的位置飞行,并一直保持爬升的高度,避免与中途的障碍物发生碰撞。
3.下降:到达起飞点之后,开始下降。
4.悬停:到达悬停点之后,开始悬停。
5.降落:到达悬停时间之后,降落。
参数说明:
RTL_RETURN_ALT 返航高度,默认值为:30m
RTL_DESCEND_ALT 悬停高度,默认值为:15m
RTL_LAND_DELAY 悬停时间,默认值为:30s
RTL_MIN_DIST 触发上升到安全高度的最小水平距离TL_RETURN_ALT,如果飞机水平靠近起飞点则以当前高度返回,而不是先上升到RTL_RETURN_ALT。
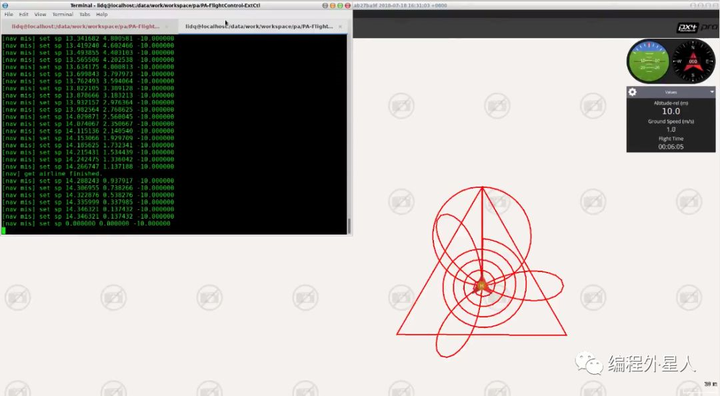
十、外部控制模式(Extern control)
作者自己开发了一个叫作外部控制的飞行模式,采用了Pixhawk(运行PX4飞控)+ RaspberryPI3(运行外部控制器程序)一起控制飞行。它们之间使用串口进行通讯,Pixhawk将无人机当前的状态(系统状态、姿态、速度、位置)实时发送给RaspberryPI3,而RaspberryPI3根据飞机当前的状态和租航线规划自动计算飞机当前的期望(期望位置、期望速度和期望姿态),并实时发送给Pixhawk,Pixhawk运行PX4程序控制飞机根据当前的期望值进行飞行。下图是无人机搭载外部控制飞行的结果:
标签:Offboard,离线,模式,返航,无人机,飞行,悬停,默认值 来源: https://www.cnblogs.com/gooutlook/p/16513723.html