pix无人机使用(3-5)系统总成-无线电控制校准
作者:互联网
https://ardupilot.org/copter/docs/common-radio-control-calibration.html
通过移动摇杆、旋钮和开关并观察哪些(如果有)绿色条移动,检查发射器中的通道映射(即检查哪些输入通道由发射器的摇杆、开关和旋钮控制)。如果这是第一次将发射器与 ArduPilot 一起使用,很可能需要更改发射器的通道映射,通常这是使用发射器本身的内置配置菜单完成的


- 通过移动摇杆、旋钮和开关并观察哪些(如果有)绿色条移动,检查发射器中的通道映射(即检查哪些输入通道由发射器的摇杆、开关和旋钮控制)。如果这是第一次将发射器与 ArduPilot 一起使用,很可能需要更改发射器的通道映射,通常这是使用发射器本身的内置配置菜单完成的
- 确定您的发射机是模式 1 还是模式 2(见下文)
- 摇杆应控制通道 1
- 变桨杆应控制通道 2
- 油门杆应控制通道 3
- 偏航杆应该控制通道 4
- 应该设置一个 3 位置开关(用于控制飞行模式)来控制通道 5(如果使用直升机)或通道 8(如果使用漫游者或飞机)。可以通过设置FLTMODE_CH参数来移动该通道
- 在直升机上,一个调谐旋钮应该控制通道 6
- 在 Copter 和 Rover 上,可以设置任何剩余的两个或三个位置开关,通过将它们映射到通道 7 到 12 来控制辅助功能
- 移动发射器的横滚、俯仰、油门和偏航杆,确保绿色条朝正确的方向移动:
- 对于横滚、油门和偏航通道,绿色条应与发射器的物理摇杆移动方向相同
- 对于俯仰,绿色条应在与发射器的物理摇杆相反的方向移动
- 如果其中一个绿色条以错误的方向移动,则反转发射器本身的通道。如果无法在发射器中反转频道,您可以通过选中“反转”复选框(仅限平面和漫游者)来反转 ArduPilot 中的频道。如果复选框不可见,则可以通过直接更改 RCx_REVERSED 参数来反转通道(其中“x”是从 1 到 4 的输入通道)。
校准
-
打开 Mission Planner 的初始设置 | 强制性硬件 | 无线电校准屏幕
-
点击右下角的绿色“校准收音机”按钮
-
提示检查无线电控制设备是否打开,未连接电池,未连接螺旋桨时按“确定”
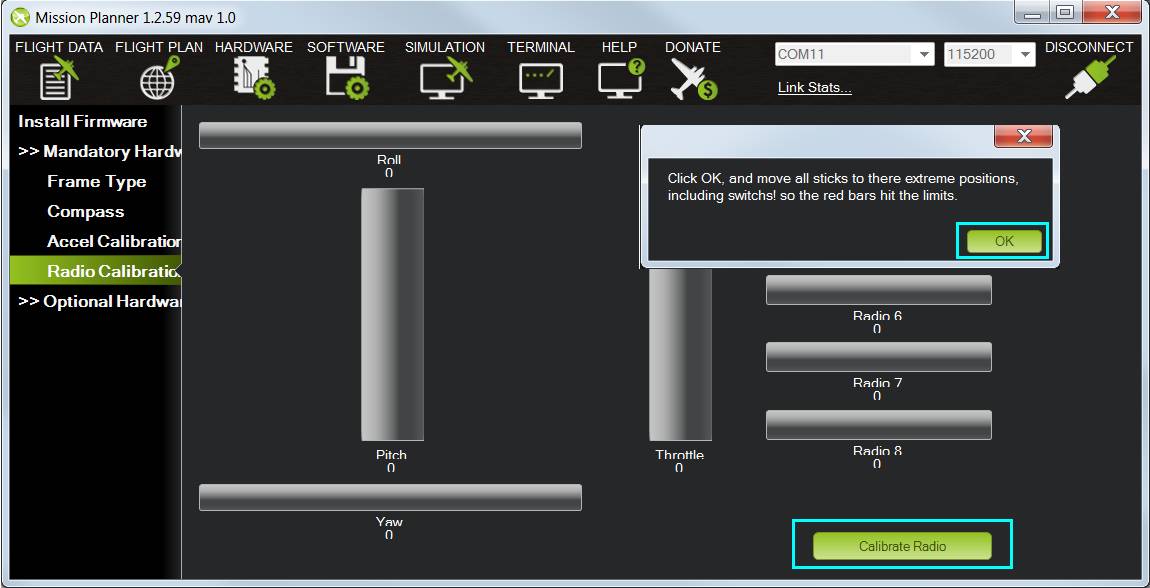
-
将发射机的控制杆、旋钮和开关移动到极限。校准条上将出现红线,以显示到目前为止看到的最小值和最大值
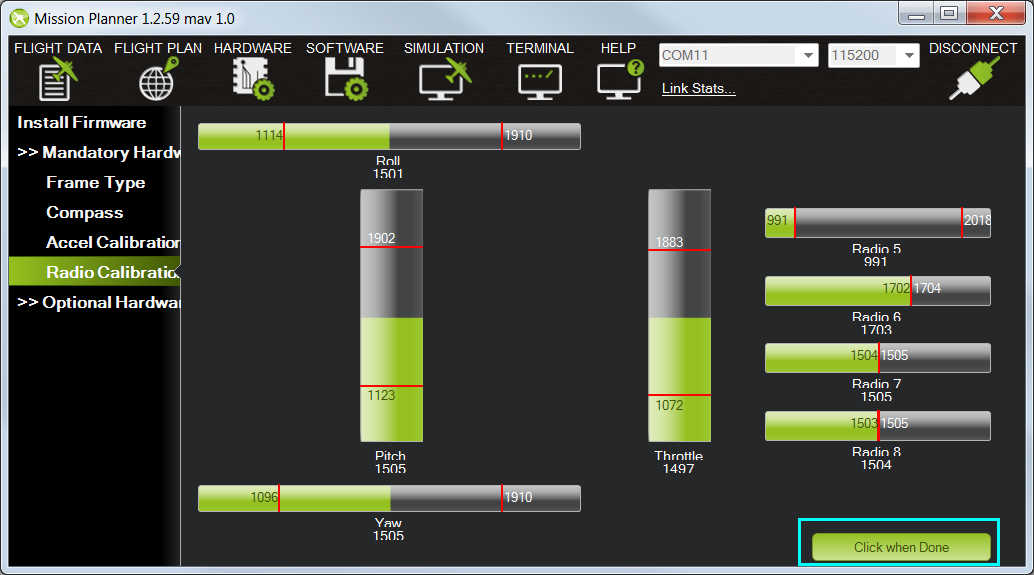
-
完成后选择单击
-
将出现一个窗口,提示“确保所有摇杆居中且油门已关闭,然后单击确定继续”。将油门移至零,然后按“确定”。
-
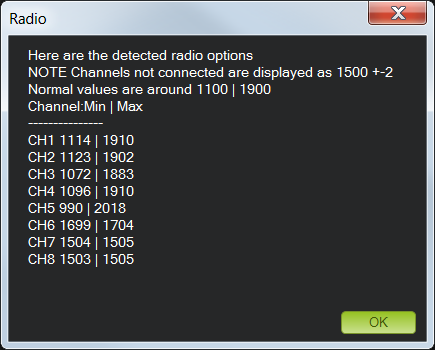
Mission Planner 将显示校准数据的摘要。正常值最小值约为 1100,最大值为 1900。
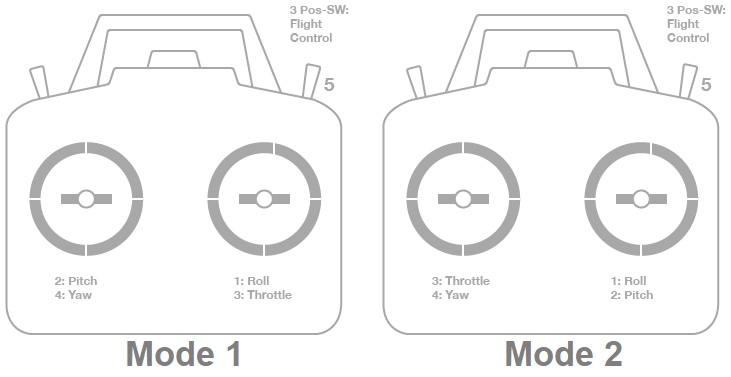
模式 1 和模式 2 发射机
有两种主要的发射器配置:
- 模式一:左摇杆控制俯仰和偏航,右摇杆控制油门和横滚。
- 模式二:左摇杆控制油门和偏航;右摇杆将控制俯仰和滚动。
通道映射
直升机默认通道映射为:
- 通道 1:滚动
- 通道 2:音高
- 通道 3:油门
- 频道 4:偏航
- 频道 5:飞行模式
- 通道 6:(可选)机载调谐或摄像机安装(映射到发射机调谐旋钮)
- 通道 7 至 12:(可选)辅助功能开关
- 可以使用RCMAP 输入通道映射更改滚动、俯仰、油门和偏航通道映射
- 飞行模式开关设置以指定每个开关位置启用的车辆模式可以在RC 发射器飞行模式配置页面上找到
标签:总成,偏航,映射,校准,开关,发射器,pix,摇杆,通道 来源: https://www.cnblogs.com/gooutlook/p/16456577.html