pix无人机使用(3-2)系统总成-连接电调和电机
作者:互联网
https://ardupilot.org/copter/docs/connect-escs-and-motors.html
将每个 ESC 的电源 (+)、接地 (-) 和信号线按电机编号连接到自动驾驶仪的主输出引脚。在下面找到您的框架类型以确定电机的指定顺序。
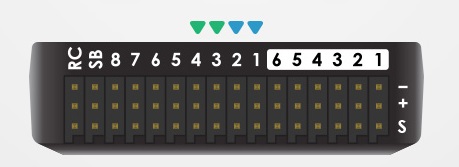
Pixhawk 输出引脚(编号)。前 4 个引脚采用颜色编码,用于连接 Quadframe
电机顺序图
下图显示了每种框架类型的电机顺序。数字表示自动驾驶仪的哪个输出引脚应连接到每个电机/螺旋桨。螺旋桨方向显示为绿色(顺时针,CW)或蓝色(逆时针,CCW)

电机顺序图图例
四轴飞行器


认识顺时针和逆时针螺旋桨
上图显示了两种类型的螺旋桨:顺时针(称为推进器)和逆时针(称为牵引器)。最可靠的是通过其形状识别正确的螺旋桨类型,如下所示。较厚的边缘是沿旋转方向移动的前缘。后缘是更激进的扇形,通常更薄。

使用 Mission Planner 电机测试检查电机编号
检查电机是否已正确连接的另一种方法是使用 Mission Planner 初始设置菜单中的“电机”测试。

标签:总成,螺旋桨,逆时针,引脚,电机,pix,顺序,无人机,连接 来源: https://www.cnblogs.com/gooutlook/p/16456426.html