矢量分析与场论(节选)
作者:互联网
2.2 标量场的方向导数和梯度
2.2.1 标量场的方向导数
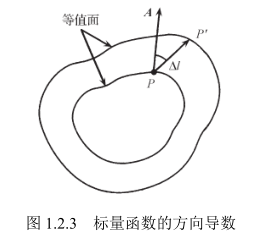
在标量场中,在 P 点沿 \(l\) 方向的变化率定义为该标量场在 P 点沿 \(l\) 方向的方向导数,记为
\[\left.\frac{\partial u}{\partial l}\right|_{P}=\lim _{\Delta l \rightarrow 0} \frac{u(x+\Delta x, y+\Delta y, z+\Delta z)-u(x, y, z)}{\Delta l} \\ =\frac{\partial u}{\partial x}cos \alpha+\frac{\partial u}{\partial y}cos \beta+\frac{\partial u}{\partial z}cos \gamma \]即需要两个东西:函数和方向
\[\vec l=\vec e_xcos\alpha +\vec e_ycos\beta +\vec e_zcos\gamma \]当然,与普通函数的导数类似,方向导数也不是百分之百存在的,需要函数满足在某点处可微,才能计算出该函数在该点的方向导数。
至于其物理含义,这里采用最常用的下山图来表示。

简单将上图看作是一座山的模型,我们处在山上的某一点处,需要走到山下。理论上来说,这座山的表面是可以通过一个函数的描述的(虽然想要找到这个函数可能很难),而这个函数可以在不同的方向上都确定出一个方向导数,这就好比于如果我们想下山,道路并不是唯一的,而是可以沿任何方向移动。区别在于有些方向可以让我们下山速度更快,有些方向让我们下山速度更慢,有些方向甚至引导我们往山顶走(也可以理解为下山速度时负的)。在这里,速度的值就是方向导数的直观理解。
2.2.2 标量场的梯度
梯度与方向导数是有本质区别的,梯度其实是一个向量,其定义为:
在空间一给定点,矢量 A 的大小等于标量函数 u 在该点的最大方向的方向导
数值,矢量 A 的方向指向使标量函数 u 的值增加最快的方向。这个矢量 A 就被定义为标
量场 u(x,y,z) 的梯度(gradient),记为 gradu=A
A 的具体表示可以参考"8 梯度的产生"[1]
梯度的基本公式:
\[\begin{aligned} &\nabla(a u)=a \nabla u, \quad a \text { 为常数 } \\ &\nabla(u \pm v)=\nabla u \pm \nabla v \\ &\nabla(u v)=u \nabla v+v \nabla u \\ &\nabla\left(\frac{u}{v}\right)=\frac{1}{v^{2}}(v \nabla u-u \nabla v) \end{aligned} \]很显然,算子 \(\nabla\)同时具有类似于矢量和微分的性质,所以常将其称作矢量微分算子。

- 想要 dz 变化最快,那么梯度的方向就被定下来了(和 dl 同向)
- 所以,如果此时测量这个方向的斜率,就是梯度的大小
- 说实话,我觉得以上证明过程很抽象,但这就是数学,而我们要做的就是从这些抽象中来理解问题的实质。
依然采用下山的例子来解释。我们想要走到山下,道路有千万条,但总有一条可以让我们以最快的速度下山。当然,这里的最快速度仅仅作用在当前的位置点上,也就是说在当前位置 A 我们选择一个方向往山下走,走了一步之后到达了另外一个位置 B,然后我们在 B 位置计算梯度方向,并沿该方向到达位置处 c,重复这个过程一直到终点。但是,如果我们把走的每一步连接起来构成下山的完整路线,这条路线可能并不是下山的最快最优路线。
原因是什么?可以用一句古诗来解释:“不识庐山真面目,只缘身在此山中。”因为我们在山上的时候是不知道山的具体形状的,因此无法找到一条全局最优路线。那我们只能关注脚下的路,将每一步走好,这就是梯度下降法的原理。 - 梯度的方向垂直于通过该点的等值面,并指向使函数值增大的方向,即该等值面的正法线方向。
常用公式:
- \(\nabla R=-\nabla'R=\frac{\vec R}{R}=e_R\)
- \(\nabla \frac{1}{R}=-\nabla'\frac{1}{R}=-\frac{\vec R}{R^3}=-\frac{e_R}{R^2}\)
2.3 矢量场的通量和散度
2.3.1 矢量场的通量
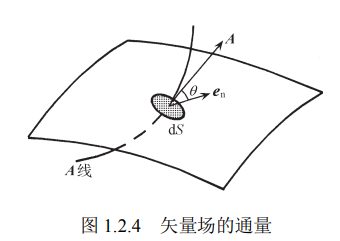
矢量场 A 穿过曲面 S 的通量线的总数称为矢量 场 A 通过曲面 S 的通量
\[\Phi=\int_S A\cdot d\vec S=\int_S A\cdot e^ndS \]2.3.2 矢量场的散度
"12 电场的散度"[2]

A 在上式中为 E
\[\begin{gathered} \nabla \cdot C=0, \quad C \text { 为常矢量 } \\ \nabla \cdot(a \boldsymbol{A})=a \nabla \cdot \boldsymbol{A}, \quad a \text { 为常数 } \\ \nabla \cdot(\boldsymbol{A}+\boldsymbol{B})=\boldsymbol{\nabla} \cdot \boldsymbol{A}+\boldsymbol{\nabla} \cdot \boldsymbol{B} \\ \boldsymbol{\nabla} \cdot(u \boldsymbol{A})=u \nabla \cdot \boldsymbol{A}+\boldsymbol{A} \cdot \nabla u, \quad u \text { 为标量函数 } \\ \nabla\cdot(A\times B)=B\cdot (\nabla\times A)-A\cdot(\nabla\times B) \end{gathered} \]2.4 矢量场的环量和旋度
如果矢量场是无源的,即该矢量场的散度处处为零,则该矢量场必定存在另一种源 ——旋涡源。而矢量场旋涡源与该矢量场的环量和旋度有关。
2.4.1 矢量场的环量
矢量场 A 沿空间一条闭合曲线 l 的线积分,称为矢量场 A 沿该闭合曲线的环量,记 为 \(\Gamma\)
\[\Gamma=\oint_l A\cdot dl \]2.4.2 矢量场的旋度
环量是一个圈,一个面,轴线为其法线,当积分方向和法线方向相同时,环量最大(类比于梯度)
旋度定义为 环量最大,此时前进方向和环量轴线方向一致。也就是说,前进方向的投影在轴线上达到最大值 。
\[\lim_{\Delta S\to 0}\frac{\oint_lA\cdot dl}{\Delta S} \]在直角坐标系中可以借助哈密顿算子 \(\nabla\) 将旋度 curl \(\vec A\) 简洁地表示为算子 $\nabla $与矢 量 A 的矢量积,即
\[\begin{aligned} \operatorname{curl} \boldsymbol{A} &=\nabla \times \boldsymbol{A} \\ &=\left(\boldsymbol{e}_{x} \frac{\partial}{\partial x}+\boldsymbol{e}_{y} \frac{\partial}{\partial y}+\boldsymbol{e}_{z} \frac{\partial}{\partial z}\right) \times\left(\boldsymbol{e}_{x} A_{x}+\boldsymbol{e}_{y} A_{y}+\boldsymbol{e}_{z} A_{z}\right) \\ &=\boldsymbol{e}_{x}\left(\frac{\partial A_{z}}{\partial y}-\frac{\partial A_{y}}{\partial z}\right)+\boldsymbol{e}_{y}\left(\frac{\partial A_{x}}{\partial z}-\frac{\partial A_{z}}{\partial x}\right)+\boldsymbol{e}_{z}\left(\frac{\partial A_{y}}{\partial x}-\frac{\partial A_{x}}{\partial y}\right) \end{aligned} \]旋度的基本公式:
\[\begin{gathered} \nabla \times \boldsymbol{C}=0, \quad \boldsymbol{C} \text { 为常矢量 } \\ \boldsymbol{\nabla} \times(\boldsymbol{A}+\boldsymbol{B})=\boldsymbol{\nabla} \times \boldsymbol{A}+\boldsymbol{\nabla} \times \boldsymbol{B} \\ \boldsymbol{\nabla} \times(a \boldsymbol{A})=a \boldsymbol{\nabla} \times \boldsymbol{A}, \quad a \text { 为常数 } \\ \boldsymbol{\nabla} \times(u \boldsymbol{A})=u \boldsymbol{\nabla} \times \boldsymbol{A}+\boldsymbol{\nabla} u \times \boldsymbol{A}, \quad u \text { 为标量函数 } \end{gathered} \]2.5 梯度、散度、旋度的比较
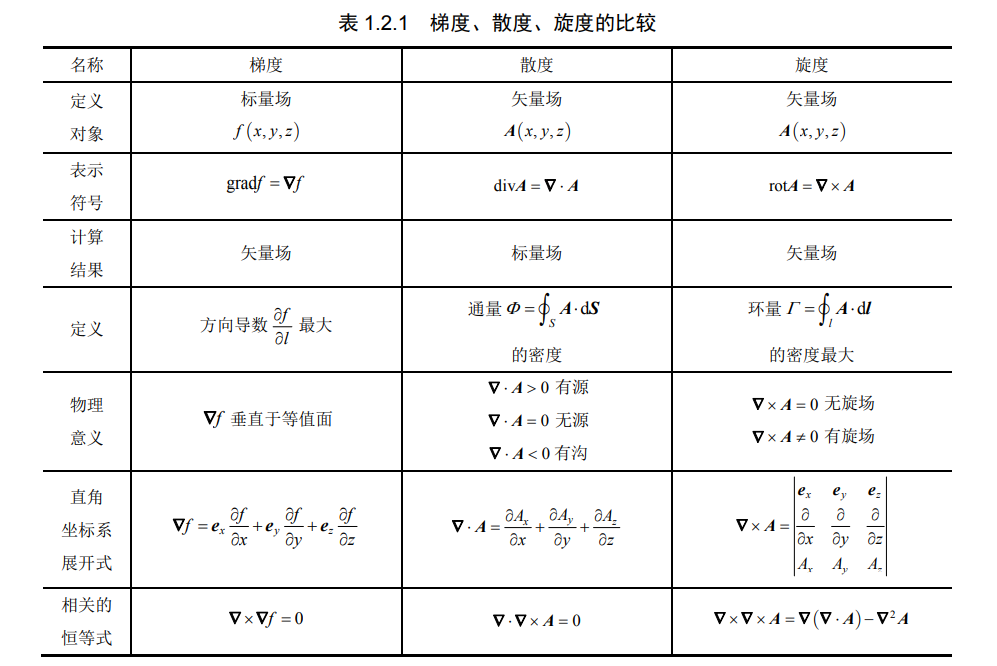
- 一个标量函数的梯度是一个矢量函数
- 描述了空间各点标量函数的最大变化律及其方向
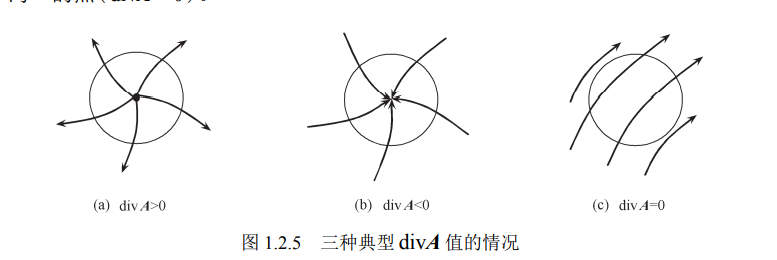
- 一个矢量函数的散度是一个标量函数
- 描述了空间各点场矢量与通量源(产生散度)之间的关系
- 一个矢量函数的旋度是一个矢量函数
- 描述了空间各点场矢量与漩涡源(产生旋度)之间的关系
一个非零是矢量场不可能既是无源场(没有通量源)又是无旋场(没有漩涡源)
3 矢量恒等式和基本定理
矢量恒等式和基本定理在矢量场和标量场的讨论和计算中是非常有用的。它们中间 的大部分通过直接计算就能够证明。简单起见,可以在直角坐标系中证明。对于其他的 正交坐标系,也都是成立的
3.1 三个重要的恒等式
3.1.1 三个重要的恒等式
\[\nabla \times \nabla u=0 \\ \nabla\cdot \nabla \times A=0 \\ \nabla\times(\nabla\times A)=\nabla(\nabla\cdot A)-\nabla^2A \]- 第一个表明:任何一个标量函数梯度的旋度必等于 0
- 梯度场(可以表示为某一标量函数梯度的矢量场)必然是无旋场,任何一个无旋场(旋度恒为 0 的场)必为有位场(例如:静电场)
- \(\vec \nabla\times \vec E=0\) \(\vec E=-\vec \nabla\Phi\)
- 第二个式子表明:任何一个矢量函数旋度的散度必等于 0
- 旋度场(可以表示为某一矢量函数的旋度的矢量场)必为无源场,任何一个无源场(散度恒为 0 的场)必为旋度场(恒定磁场)
- \(\vec\nabla \cdot B=0\) \(\vec B=\vec \nabla \times \vec A\)
- 第三个式子奠定了波函数的基础
3.1.2 直角坐标系中的拉普拉斯算子\(\nabla^2\)
矢量场中的拉普拉斯运算


直角坐标系中矢量场的拉普拉斯运算

直角坐标系中标量场的拉普拉斯运算


- 其他坐标系中标量场的拉普拉斯运算就是计算标量场的梯度的散度,不能等于两个哈密顿的标量积
- 在其他坐标系中对矢量场的拉普拉斯运算后的矢量的每个分量将有可能与矢量的所有的分量有关。
3.2 矢量场的基本定理
3.2.1 高斯散度定理
矢量场穿过空间内任一闭合曲面的通量等于该矢量的散度在曲面所包围体积分

- 可以理解为:在一个闭合曲面内,矢量场 A 穿过闭合曲面 S 的通量与所有 N 个小闭合曲面的通量之和相等。根据散度的定义,无穷小曲面的通量和体积的比,,N 趋向于无穷大,可证。
3.2.2 斯托克斯定理
矢量场沿空间任一闭合曲线的环量等于该矢量场的旋度穿过以闭合曲线作为边界曲线的任一开放曲面的通量。


- 可以理解为:开放曲面 S 可以分为很多个小闭合曲线,由于每两个相邻小面积间有一部分公共边界,环绕方向相反,所以矢量场 A 沿这两段相邻边界的积分相互抵消,于是矢量场 A 沿闭合边界曲线 l 的环量就应该等于沿着所有 N 个小闭合边界曲线的环量的代数和。

由旋度的定义,可得

- 曲面正法线方向和闭合曲线的正向符合右手螺旋定则
这一公式表明,矢量场 A 沿空间任一闭合曲线\(l\)的环量等于该矢量场的旋度穿过以\(l\)作为边界曲线 的任一开放曲线 S 的通量
3.2.3 格林第一定理
\(u,w\) 为任意两个定义在空间区域 V 中的标量函数,并且具有连续的二阶偏导数,则满足以下恒等式
形式一

形式二(借助方向导数改写)

据说该定理可令 \(\vec A=w\vec \nabla u\),再通过高斯散度定理进行证明。
3.2.4 格林第二定理
将第一定理中 u 和 w 的位置对调,再与第一定理相减
形式一

形式二(借助方向导数改写)

3.2.5 唯一性定理
若在区域 \(V\) 内矢量场 \(\vec A\) 的散度 \(\nabla \cdot \vec A\)、旋度 \(\nabla\times \vec A\) 以及在边界面 \(S\) 上的切线分量 \(\vec A_t\)(或法向分量 \(A_n\))已经给定,则矢量场在该区域内的解是唯一的。
3.2.6 亥姆霍兹定理
矢量场的唯一性定理表明,空间任一区域内的场被该区域内的源(包括通量源以及漩涡源,即是散度和旋度不为 0 的值)和该区域表面的边界条件(切向边界条件或法向边界条件)唯一地确定。
但这一定理未给出这些物理量之间的定量关系。亥姆霍兹定理给出了这一关系。
空间有限区域 \(V\) 内的任一矢量场 \(\vec F\) 均可以表示为一个无源场 \(\vec F_1\)(即 \(\vec \nabla \cdot \vec F_1=0\) 或 \(\vec F_1=\vec \nabla \times \vec A\))和一个无旋场 \(\vec F_2\) (即 \(\vec \nabla \times \vec F_2=0\) 或 \(\vec F_2=-\vec \nabla \Phi\))之和

式中矢量 A 和标量 \(\Phi\) 可表示为

假设空间区域为无限大,而场源分布在一个有限的区域内,假设矢量场在无限远处以足够快的速度减弱至零,即(具有无限大面积 S 的面积分将等于 0,所以只需要进行体积分)

- 表明:在无限大空间中,只要知道矢量场的散度和旋度,就能将空间中的这个矢量场定量地确定下来。(这就是为什么在以后对各类电磁场的讨论中,总是首先讨论场的散度特性和旋度特性的原因)
亥姆霍兹定理的两个应用
- 无限大真空中的静电场
亥姆霍兹等同于库伦定律

- 无限大真空中的恒定磁场
亥姆霍兹等同于毕奥萨法尔定律

4 常用正交曲线坐标系
4.1 三种常用的正交坐标系
正交曲线坐标系的类型很多,已经出现的有 10 种以上。除了直角坐标系这种特殊的正交曲线坐标系以外,其他的还有圆柱、球面、椭圆柱、抛物柱等正交曲线坐标系。三种常用的正交曲线坐标系就是直角坐标系、圆柱坐标系和球面坐标系。
- 正交曲线坐标轴上的单位矢量相互正交并且复合右手螺旋法则
4.1.1 直角坐标系

从上图可以看出,直角坐标系中,长度元\(dl\),面积元\(dS\),体积元\(dV\)
4.1.2 圆柱坐标系


4.1.3 球面坐标系



4.2 三种常用坐标系的转换
坐标系的转换包括坐标的转化和方向矢量的转换
4.2.1 直角坐标系与圆柱坐标系之间的关系

4.2.2 直角坐标系与球面坐标系之间的关系

4.2.3 圆柱坐标系与球面坐标系之间的关系

4.3 三种常用坐标系中的梯度、散度、旋度和拉普拉斯展开式
4.3.1 直角坐标系中梯度、散度、旋度和拉普拉斯展开式

- 只有在直角坐标系中,梯度、散度、旋度和拉普拉斯展开式可以看成是哈密顿算子与标量函数或者矢量函数的乘积

4.3.2 圆柱坐标系中梯度、散度、旋度和拉普拉斯展开式

4.3.3 球面坐标系中梯度、散度、旋度和拉普拉斯展开式

8 梯度的产生

再对比一下我们上面推导出来的 全微分定理 :
这个全微分定理的右边跟矢量点乘的右边是不是很像?都是两个量相乘然后把结果加起来。如果我们把 dx 看作 x2,dy 看作 y2,两个偏导数看作 x1 和 y1,那么我们就可以按照这个点乘的公式把这个全微分定理拆成两个矢量点乘的样子,即 dz 可以写成这样:

于是,dz 就被我们拆成了两个矢量点乘的样子,我们再来仔细看看这两个矢量:右边的这个矢量的两个分量分别是 dx 和 dy,这分别是我 沿着 x 轴和 y 轴分别移动无穷小的距离 ,它们相加的结果用 dl 来表示:
而左边呢,左边这个矢量的两个分量分别是函数 z=f(x,y)对 x 和 y 的两个偏导数,这个我们也用一个新的符号来表示它:
绕了这么久,我们现在终于看到这个 \(\nabla\) 符号了,这个 \(\nabla\)的名字就叫:z 的 梯度 。
把左右两边的矢量都单独拎出来之后,我们就可以把原来的式子写成更简单的样子:
12 电场的散度
当我们把电场的散度写成 ▽·E 这样的时候,我们会觉得:啊,好简洁!但是我们也知道 ▽ 算子的定义是这样的:
那么 ▽·E 就应该写成这样:
而我们知道电场 E 其实是一个矢量函数(不同点对应的电场的情况),那我们还是可以把 E 分解成 x,y 两个分量的和,这两个分量后面跟一个 x 和 y 方向的单位向量就行了。那么,上面的式子就可以写成这样:

然后,因为矢量点乘是满足分配律的,所以我们可以把他们按照普通乘法一样展开成四项。而 x 和 y 是垂直的单位向量,所以 x·y=y·x=0 , x·x=y·y=1 ,然后我们最后剩下的就只有这两项了:
这就是电场 E 的散度的 最终表达式 ,它的意思很明显: 我们求电场 E 的散度就是把矢量函数 E 分解成 x 和 y 方向上的两个函数,然后分别对它们求偏导,最后再把结果加起来就行了 。
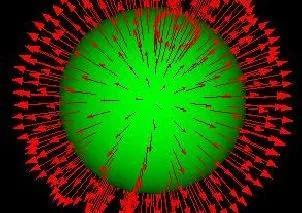
我们现在有了一个定义良好,计算方便的 散度 ▽· 表达式了,但是,你还记得我们在开始讲到的散度的定义么?我们最开始是怎样引入散度的呢?
我们是从麦克斯韦方程组的积分形式引入散度的。高斯电场定律说通过一个闭合曲面的电通量跟这个闭合曲面包含的电荷量成正比,而且这个曲面可以是任意形状。然后我们为了从宏观进入微观,就让这个 曲面不停地缩小缩小 ,当它缩小到 无穷小 ,缩小到只包含了一个点的时候,这时候我们就说通过这个无穷小曲面的通量和体积的比就叫 散度 (用 div 表示)。
也就是说,我们最开始从无穷小曲面的通量定义来的散度和我们上面通过偏导数定义来的 散度 ▽· 指的是同一个东西。即:
标签:矢量,partial,boldsymbol,节选,散度,vec,场论,nabla 来源: https://www.cnblogs.com/zjj666/p/15392808.html