信赖域(一):Cauchy Point与Dogleg
作者:互联网
信赖域(一):Cauchy Point与Dogleg
王金戈从本文开始介绍优化方法的另一大类——信赖域方法。
基本思想
先回顾一下前面几篇文章介绍过的线搜索方法。在线搜索方法的每次迭代中,先确定一个搜索方向,然后沿着该方向寻找一个最佳的步长,使得目标函数在该步长下降得最多。如此迭代下去,直到满足收敛所需的条件。在确定搜索方向时,一般选择梯度下降方向或牛顿方向(即二阶近似的极小值方向)。搜索步长时,一般采用回溯法或back-and-forth方法。
信赖域方法的思路有所不同。在信赖域方法的每次迭代中,先确定一个信赖域半径,然后在该半径内计算目标函数的二阶近似的极小值。如果该极小值使得目标函数取得了充分的下降,则进入下一个迭代,并扩大信赖域半径,如果该极小值不能令目标函数取得充分的下降,则说明当前信赖域区域内的二阶近似不够可靠,需要缩小信赖域半径,重新计算极小值。如此迭代下去,直到满足收敛所需的条件。我们结合下图做进一步的解释。
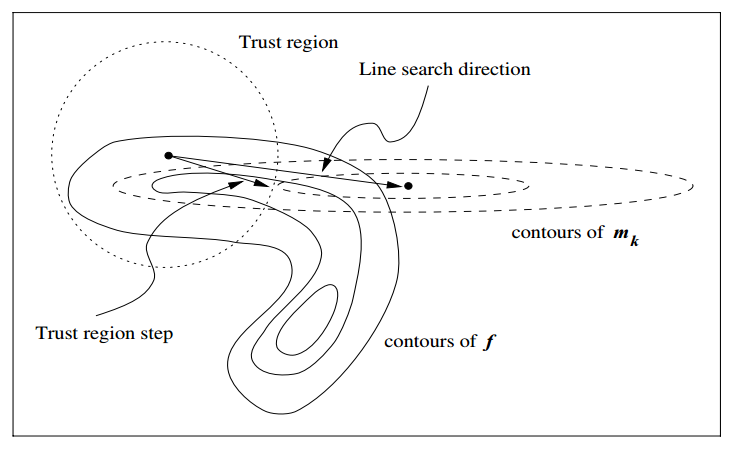
图中,实线表示了目标函数 的等高线,它非常扭曲,因为这样更容易说明信赖域存在的价值。左上的黑点是当前位置,记作
,即第
次迭代的初始位置。以
为圆心,根据信赖域半径
作圆,得到左上方圆形的信赖域。在
处对目标函数进行二阶近似,得到近似后的二阶函数
其中, 是
处的海森矩阵或近似海森矩阵。在近似后的目标函数中,我们把迭代的步长(含方向)
作为变量,探究当
在信赖域范围内取何值时能够使得
最小。
在二维的情况下, 的等高线是图中椭圆形的虚线。可以看到,在
附近,
还比较接近于
,但在信赖域以外,它们就差得很远了。
的极小值点更是与
的极小值点差了十万八千里。在这种情况下,如果用线搜索方法中的牛顿法,搜索方向就会直接指向
的极小值点,即图中标出的“Line search direction”。然而,这一方向几乎是与目标函数的等高线平行的,沿着该方向搜索根本无法取得足够的下降。
信赖域方法则好得多,虽然仍旧用 近似目标函数,但在信赖域半径的限制下,我们会找到图中标记为“Trust region step”的向量,该向量正是信赖域范围内使得
最小的步长。显然,此时的
比线搜索方法的结果好得多。
不过,这一现象比较依赖于信赖域半径的选取。可以想象,如果信赖域半径非常大,我们仍然会找到 的极小值点,但此时,这一步长是不能接受的,我们不会进入下一次迭代,而是要重新设置信赖域半径,重新计算步长。那么步长是否可接受的条件是什么呢?定义变量
分母表示目标函数的二阶近似的减小量,分子表示目标函数的减小量。如果 接近于1,说明二阶近似很接近目标函数,这一步长是可以接受的。如果
接近于0甚至小于0,说明二阶近似与真实的目标函数差距较大,我们需要减小信赖域半径,并重新计算步长。
现在,信赖域方法就只剩一个问题了,如何计算 的极小值,即式(4.3)的极小值。直接求当然可以,但也有其它可选方案。根据是否求确切解可以将信赖域方法分为两类,一类是近似方法,只求取信赖域范围内
的近似极小值,适用于问题规模较大,需要节约计算量的情况,另一类是确切方法,计算
更精确的极小值,适用于小规模的问题。本文介绍第一类方法,下篇文章会介绍第二类方法。
Cauchy Point
首先考虑一种最简单的计算 极小值的近似方法。我们固定
的方向为梯度下降方向,沿着该方向寻找位于信赖域内的极小值。即,选择这样的步长
其中
它的含义是, 的方向与梯度下降方向
一致,大小为
。当
时,意味着
是个单调下降函数,所以直接令步长达到信赖域的边界即可,即
。否则,
是个开口向上的二次函数,极小值可以通过令
求得,如果极小值在信赖域内部,则取该步长,否则仍然令步长达到信赖域的边界。
下图展示了这种方法在我们的例子中的效果
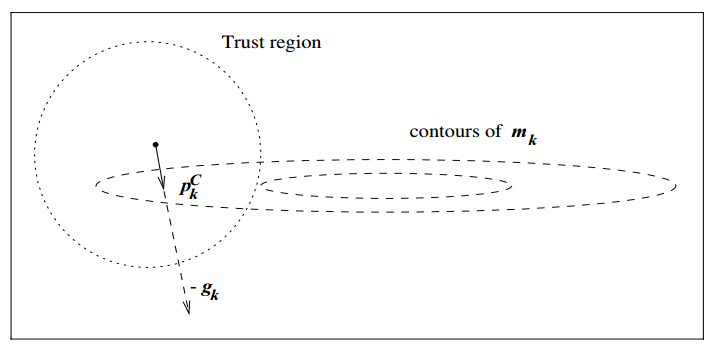
很明显, 的确在梯度下降方向这条线上。事实上,这也是最速下降法应用在信赖域中的最佳结果。但显然这不是最好的结果,
不是信赖域中的极小值点,甚至离极小值点还远得很。但它却有一个响亮的名字——Cauchy Point,之后我们会看到其它算法中都有它的影子,这是其它信赖域方法的基础。另一方面,Cauchy Point方法是最速下降法的一种实现,所以它是全局收敛的,这也奠定了它的基础地位,其它方法只要不差于Cauchy Point方法,就都能保证全局收敛性。
Dogleg
对Cauchy Point的改进,首推Dogleg。
考虑 正定的情况,当
的极小值位于信赖域内时,步长就是牛顿法的解,我们记作
。比较麻烦的是当极小值点位于信赖域外时,你会发现不同的信赖域半径对应的最佳步长的方向都不一样。需要注意的是,这里提到了“最佳步长”,我猜很多人会以为直接求
与信赖域边界的交点就可以了,最初我也是这样想的,但回顾本文的第一幅图,“Trust region step”是所谓的最佳步长,它并非
与信赖域半径的交点。所以,针对不同的信赖域半径求最佳步长是比较困难的,至少没有我们想象的那么容易。
Dogleg方法则提供了一种良好的近似,使得我们可以轻松计算出针对任意信赖域半径的最佳步长。下图展示了Dogleg是如何对真实的最佳步长进行近似的。
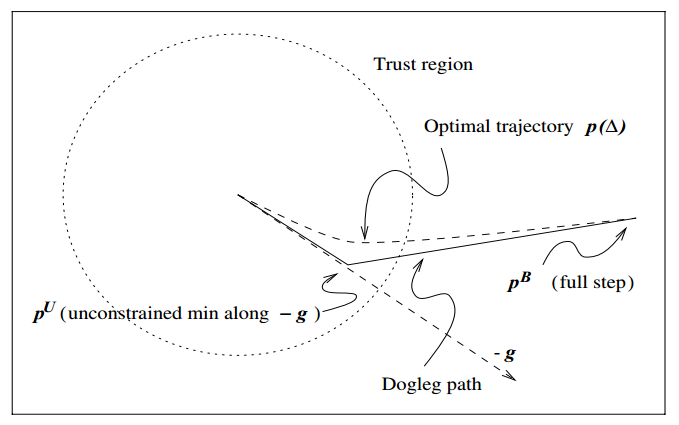
图中“Optimal trajectory”即为真实的最佳步长,它是一条曲线,曲线方程我们无从得知。它的特点是,当信赖域半径很小时,比较接近于Cauchy Point方向,当信赖域半径比较大时,比较接近于无约束的Cauchy Point与 的连线方向。根据这个规律,我们只需要计算出无约束的Cauchy Point
和
,就能得到两个线段,这就是近似的最佳步长所在的线段。我们把这条折线叫做Dogleg,因为它看起来像一条狗腿。
可以证明,在到达 之前,沿着Dogleg前进,步长的大小是单调递增的,同时
是单调下降的。因此信赖域边界与Dogleg至多有一个交点。在Dogleg方法的每次迭代中,只需要计算给定信赖域半径
对应的最佳步长,然后按照式(4.4)判断是否满足要求,是则进入下一个迭代,否则缩小
再次计算。
改进方案
以上介绍的就是经典的Dogleg方法。在此基础上,还有一种近似程度更高的方法,称为二维子空间最小化(Two-Dimensional Subspace Minimization),这种方法不再是简单地在一条折线上寻找极小值,而是在折线所在的二维平面上寻找极小值,这样就能找到上图中虚线表示的“Optimal Trajectory”。结果会更加精确,但计算量略大于Dogleg,所以实际中并不一定有必要使用这一改进方案。
如果近似海森矩阵 不正定,即存在
的情况,此时
是一个单调下降的函数,也就不存在
,Dogleg就不适用了。不过我们可以修改近似海森矩阵,使其变得正定,比如用
代替
。可以证明,当
时
正定,其中
是
最小的负特征值。
如果优化变量的规模特别大,导致 的维度非常高,那么无论是用Dogleg还是二维子空间最小化,都涉及到求
或
的步骤,非常耗费计算量。在后面的系列文章中,我们会提到一种迭代求解线性方程的方法——共轭梯度法。共轭梯度法可以经过N次迭代求出N维线性方程的解,而且整个过程不需要对矩阵求逆。把共轭梯度法应用到信赖域方法中,就有了称为CG-Steihaug的方法(CG是共轭梯度的缩写),基本流程与信赖域的流程一致,只不过每次迭代求式(4.3)的极小值时使用共轭梯度法来求,避免矩阵求逆的过程。
这里我们不去深究二维子空间最小化和CG-Steihaug方法的具体细节,因为前者只是对Dogleg的扩展,换一种参数化形式来表示 ,并对式(4.3)应用拉格朗日乘数法,即可求得在信赖域约束下平面上的最小值点,感兴趣的同学可以参考文末的参考资料第一条。后者的主要流程涉及到共轭梯度法的细节,我们会在后续的文章中详细介绍。
参考资料
如何理解拉格朗日乘子法? 马同学
上一篇:线搜索(二):收敛性和收敛速度编辑于 01-07 数值最优化(书籍) 最优化
下一篇:信赖域(二):确切方法
标签:Dogleg,Point,近似,步长,Cauchy,信赖,极小值,方法 来源: https://www.cnblogs.com/cx2016/p/13780278.html