ros随记1
作者:互联网
IMU是惯性测量单元的简称,用于测量物体的三轴姿态角(roll、pitch、yaw)、三轴加速度(acc_x、acc_y、acc_z)、三轴角速度(w_x、w_y、w_z)等。IMU惯性测量单元在制造过程中,由于物理因素,导致IMU惯性测量单元实际的坐标轴与理想的坐标轴之间会有一定的偏差,同时三轴加速度、三轴角速度、三轴磁力计的原始值会与真实值有一个固定的偏差等。这里提到的自校准就是要通过给的补偿值来减小或消除坐标轴的偏差及原始值的固定偏差,也就是所谓的IMU内部标定。如果将IMU安装到机器人或摄像头上后,需要知道IMU与机器人或摄像头的相对位置,这个时候进行的标定就是所谓的IMU外部标定。特此说明,这里提到的自校准指IMU内部标定。这里提到的九轴数据融合,是指通过三轴加速度、三轴角速度数据融合得到更加精准的三轴加速度、三轴角速度,同时通过三轴加速度、三轴角速度、三轴磁力计数据融合得到测量物体的三轴姿态角。选用一款带自校准九轴数据融合的IMU,能很好的提升机器人的SLAM建图与导航性能,同时降低机器人上软件的开发难度。出于这一点,我们选用了一款基于MPU9250的.带自校准九轴数据融合IMU,如图6。
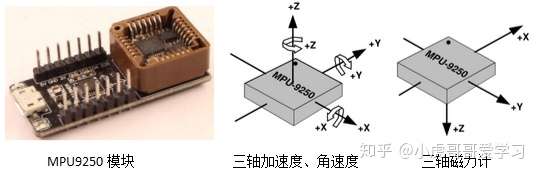 (图6)带自校准九轴数据融合IMU惯性传感器
(图6)带自校准九轴数据融合IMU惯性传感器
1.ydlidar-x4激光雷达
在移动机器人中,获取机器人周围障碍物和环境的轮廓形状是非常重要的。使用激光雷达正是为了实现这个目的。利用扫描得到的障碍物信息,机器人就可以利用SLAM建立地图、并进行避障和自主导航。考虑到成本,推荐大家选用低成本的2D激光雷达,这里推荐的ydlidar-x4激光雷达正是一款极低成本的2D激光雷达,作为学习性能足够用了。
1.1.硬件概述
 (图1)ydlidar-x4激光雷达实物
(图1)ydlidar-x4激光雷达实物
雷达主体由激光测距模组和电机构成,雷达主体需要连接转接板,用于实现外部供电和UART转USB,如图1。
 (图2)ydlidar-x4激光雷达性能参数
(图2)ydlidar-x4激光雷达性能参数
测距频率是指每秒钟测距的次数(即激光测距模组的采样率),测距频率默认为5KHz;扫描频率是指电机每秒钟转过的圈数,扫描频率默认为8Hz;测距范围是指落在此距离范围的障碍物才能被测量,测距范围为0.12~10m;扫描角度为0~360度,也就是能够360度全方位扫描;测距分辨率就是测距精度;角度分辨率就是两个相邻扫描点之间的夹角。ydlidar-x4激光雷达性能参数,如图2。
opencr
https://mc.dfrobot.com.cn/thread-26938-1-1.html
https://zhuanlan.zhihu.com/c_1084087088789569536
标签:x4,三轴,IMU,激光雷达,ydlidar,ros,测距,随记 来源: https://www.cnblogs.com/jzcui/p/12732518.html