pix无人机使用(3-4)系统总成-将 Mission Planner 连接到 AutoPilot
作者:互联网
Windows 上必须存在连接硬件的驱动程序,因为这使Mission Planner可以使用连接的 COM 端口和默认数据速率。

Pixhawk USB 连接

使用 SiK Radio 连接
在Mission Planner上,使用屏幕右上角的下拉框设置连接和数据速率。
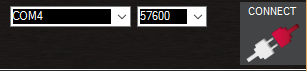
连接 USB 或遥测无线电后,Windows 将自动为您的自动驾驶仪分配一个 COM 端口号,该端口号将显示在下拉菜单中(实际数字无关紧要)。还设置了连接的适当数据速率(通常 USB 连接数据速率为 115200,无线电连接速率为 57600)。
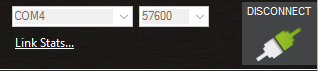
选择所需的端口和数据速率,然后按Connect 按钮连接到自动驾驶仪。连接后Mission Planner 将从自动驾驶仪下载参数,按钮将变为Disconnect,如图所示:
小费
“选择端口”下拉菜单还包含 TCP 或 UDP 端口选项,可用于通过网络连接到自动驾驶仪。
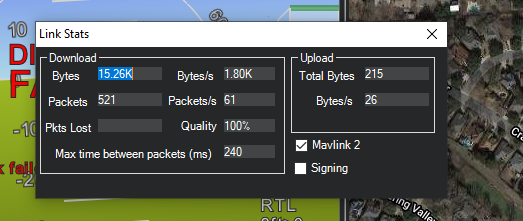
端口选择框下方的“Stats...”热链接,如果单击,将提供有关连接的信息,例如签名安全是否处于活动状态,链接统计信息等。有时此窗口会在当前屏幕下方弹出,必须带上到前面才能看到。
标签:Planner,端口,Mission,驾驶仪,pix,速率,连接 来源: https://www.cnblogs.com/gooutlook/p/16456523.html