二维计算几何学习笔记
作者:互联网
三态函数dcmp
dcmp用来减少精度问题。
const double eps =1e-10;
int dcmp(double x) {
if(fabs(x)<eps) return 0;
else return x<0?-1:1;
}
点与向量
点与向量的关系
令点为\(D\),向量为\(V\),常数为\(C\)
则有:
\[D-D=V \]\[V+V=V \]\[D+V=D \]\[D+D=\textbf{无意义} \]\[V \times C=C \]\[\frac{V}{C}=V \]点与向量的实现
struct Point{
double x,y;
Point(double x=0,double y=0):x(x),y(y){ }
};
typedef Point Vector; // 偷个懒
Vector operator+(Vector A,Vector B){
return Vector(A.x+B.x,A.y+B.y);
}
Vector operator-(Point A,Point B){
return Vector(A.x-B.x,A.y-B.y);
}
Vector operator*(Vector A,double p){
return Vector(A.x*p,A.y*p);
}
Vector operator/(Vector A,double p){
return A*(1/p);
}
bool operator==(const Point& a,const Point &b){
return dcmp(a.x-b.x)==0&&dcmp(a.y-b.y)==0;
}
bool operator<(const Point &a,const Point &b){
return a.x<b.x||(a.x==b.x&&a.y<b.y);
}
点积、长度与夹角
// 计算点积
double Dot(Vector A,Vector B){
return A.x*B.x+A.y*B.y;
}
//长度
double Length(Vector A){
return sqrt(Dot(A,A));
}
// 夹角
double Angle(Vector A,Vector B){
return acos(Dot(A,B)/Length(A)/Length(B));
}
内积(点乘|点积)的几何意义包括:
-
表征或计算两个向量之间的夹角
-
b向量在a向量方向上的投影
from:Here
叉积与三角形面积
// 差积
double Cross(Vector A,Vector B){
return A.x*B.y-A.y*B.x;
}
// 三角形面积
double Area2(Point A, Point B,Point C){
return Cross(B-A,C-A);
}
向量旋转、单位法线
// 向量旋转,rad是弧度
Vector Rotate(Vector A,double rad){
return Vector(A.x*cos(rad)-A.y*sin(rad),A.x*sin(rad)+A.y*cos(rad));
}
// 单位法线,A不能是零向量
Vector Normal(Vector A){
double L = Length(A);
return Vector(-A.y/L,A.x/L);
}
点与线的关系
直线交点
// 直线交点 两直线为f(t)=P+tv,g(t)=Q+tw。
Point GetLineIntersection(Point P,Vector v,Point Q,Vector w){
Vector u=P-Q;
double t=Cross(w,u)/Cross(v,w);
return P+v*t;
}
点到直线的距离
// 点到直线的距离,P到直线AB的距离,directed确定是否为有向距离
double DistanceToLine(Point P,Point A,Point B,bool directed=false){
Vector v1=B-A;
Vector v2=P-A;
return directed?(fabs(Cross(v1,v2))/Length(v1)):((Cross(v1,v2))/Length(v1));
}
点到线段的距离
double DistanceToSegment(Point P,Point A,Point B){
if(A==B)return Length(P-A);
Vector v1=B-A,v2=P-A,v3=P-B;
if(dcmp(Dot(v1,v2))<0){
return Length(v2);
}
if(dcmp(Dot(v1,v3))>0){
return Length(v3);
}
return fabs(Cross(v1,v2))/Length(v1);
}
点在直线上的投影
// 点P在直线AB上的投影
Point GetLineProjection(Point P,Point A,Point B){
Vector v=B-A;
return A+v*(Dot(v,P-A)/Dot(v,v));
}
线段相交判定、点在直线上判定
// 线段相交判定,线段(a1,a2)与(b1,b2)
// 不含端点相交
bool SegmentProperIntersection(Point a1,Point a2,Point b1,Point b2){
double c1=Cross(a2-a1,b1-a1);
double c2=Cross(a2-a1,b2-a1);
double c3=Cross(b2-b1,a1-b1);
double c4=Cross(b2-b1,a2-b1);
return dcmp(c1)*dcmp(c2)<0&&dcmp(c3)*dcmp(c4)<0;
}
// 点p是否在线段(a1,a2)上
bool OnSegment(Point p,Point a1,Point a2){
return dcmp(Cross(a1-p,a2-p))==0&&dcmp(Dot(a1-p,a2-p))<0;
}
多边形
多边形有向面积
// 多边形有向面积:n边形面积
double ConvexPolygonArea(Point *p,int n){
double area=0;
for(int i=2;i<n;i++){
area+=Cross(p[i]-p[1],p[i+1]-p[1]);
}
return area/2;
}
例题
UVA11178 Morley's Theorem
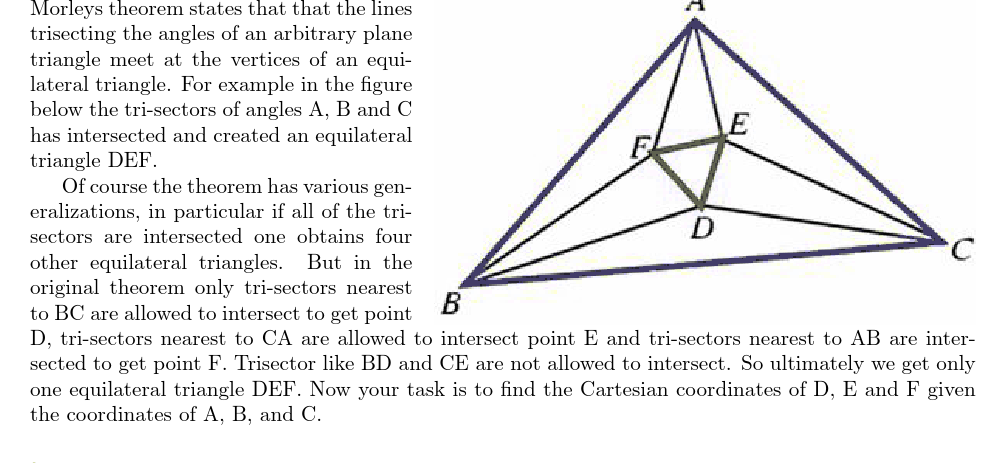
莫雷定理,关键在于计算\(D\)点。
首先需要计算\(\angle ABC\)的值\(\alpha\),然后把射线\(BC\)逆时针旋转\(\frac{\alpha}{3}\),得到直线\(BD\),同理可得直线\(CD\),然后求交点。
AC代码如下:
#include <bits/stdc++.h>
using namespace std;
struct Point{
double x,y;
Point(double x=0,double y=0):x(x),y(y){ }
};
typedef Point Vector; // 偷个懒
Vector operator+(Vector A,Vector B){
return Vector(A.x+B.x,A.y+B.y);
}
Vector operator-(Point A,Point B){
return Vector(A.x-B.x,A.y-B.y);
}
Vector operator*(Vector A,double p){
return Vector(A.x*p,A.y*p);
}
Vector operator/(Vector A,double p){
return A*(1/p);
}
// 计算点积
double Dot(Vector A,Vector B){
return A.x*B.x+A.y*B.y;
}
//长度
double Length(Vector A){
return sqrt(Dot(A,A));
}
// 夹角
double Angle(Vector A,Vector B){
return acos(Dot(A,B)/Length(A)/Length(B));
}
// 差积
double Cross(Vector A,Vector B){
return A.x*B.y-A.y*B.x;
}
// 向量旋转,rad是弧度
Vector Rotate(Vector A,double rad){
return Vector(A.x*cos(rad)-A.y*sin(rad),A.x*sin(rad)+A.y*cos(rad));
}
// 直线交点 两直线为f(t)=P+tv,g(t)=Q+tw。
Point GetLineIntersection(Point P,Vector v,Point Q,Vector w){
Vector u=P-Q;
double t=Cross(w,u)/Cross(v,w);
return P+v*t;
}
Point getD(Point A, Point B, Point C){
Vector v1=C-B;
double a1=Angle(A-B,v1);
v1=Rotate(v1,a1/3);
Vector v2=B-C;
double a2=Angle(A-C,v2);
v2=Rotate(v2,-a2/3);
return GetLineIntersection(B,v1,C,v2);
}
void read_point(Point &poi){
int x,y;
cin>>x>>y;
poi.x=x;
poi.y=y;
}
int main(){
int t;
Point A,B,C,D,E,F;
cin>>t;
while(t--){
read_point(A);
read_point(B);
read_point(C);
D=getD(A,B,C);
E=getD(B,C,A);
F=getD(C,A,B);
printf("%.6lf %.6lf %.6lf %.6lf %.6lf %.6lf\n",D.x,D.y,E.x,E.y,F.x,F.y);
}
return 0;
}
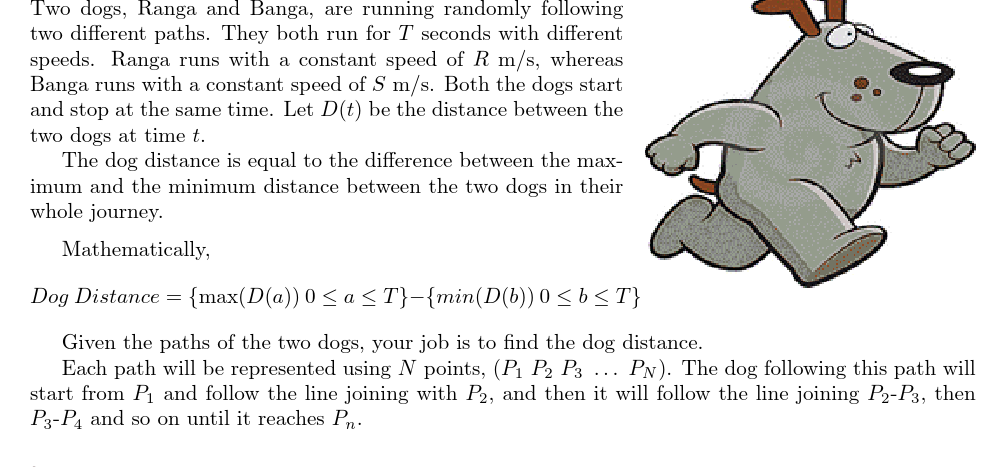
UVA11796 Dog Distance
主要代码:
const int MX=60;
int t,a,b;
Point p[MX],q[MX];
double minn,maxn;
void update(Point P,Point A,Point B){
minn=min(minn,DistanceToSegment(P,A,B));
maxn=max(maxn,Length(P-A));
maxn=max(maxn,Length(P-B));
}
void read_point(Point &poi){
int x,y;
cin>>x>>y;
poi.x=x;
poi.y=y;
}
int main(){
cin>>t;
for(int kase=1;kase<=t;kase++){
cin>>a>>b;
for(int i=0;i<a;i++){
read_point(p[i]);
}
for(int i=0;i<b;i++){
read_point(q[i]);
}
double lena=0,lenb=0;
for(int i=0;i<a-1;i++){
lena+=Length(p[i+1]-p[i]);
}
for(int i=0;i<b-1;i++){
lenb=Length(q[i+1]-q[i]);
}
int sa=0,sb=0;
Point pa=p[0],pb=q[0];
minn=1e9;maxn=-minn;
while(sa<a-1&&sb<b-1){
double la=Length(p[sa+1]-pa);
double lb=Length(q[sb+1]-pb);
double T = min(la/lena,lb/lenb);
Vector va=(p[sa+1]-pa)/la*T*lena;
Vector vb=(q[sb+1]-pb)/lb*T*lenb;
update(pa,pb,pb+vb-va);
pa=pa+va;
pb=pb+vb;
if(pa==p[sa+1]){
sa++;
}
if(pb==q[sb+1]){
sb++;
}
}
printf("Case %d: %.0lf\n",kase,maxn-minn);
}
return 0;
}
结果\(\color{red}\textbf{
Unaccepted}\)了。但是样例过了,求放过。
标签:return,Point,double,Cross,笔记,v1,二维,Vector,几何 来源: https://www.cnblogs.com/xiezheyuan/p/two-dimensional-computational-geometry-note.html