Nebula Graph 源码解读系列 | Vol.03 Planner 的实现
作者:互联网

上篇我们讲到 Validator 会将由 Parser 生成的抽象语法树(AST)转化为执行计划,这次,我们来讲下执行计划是如何生成的。
概述
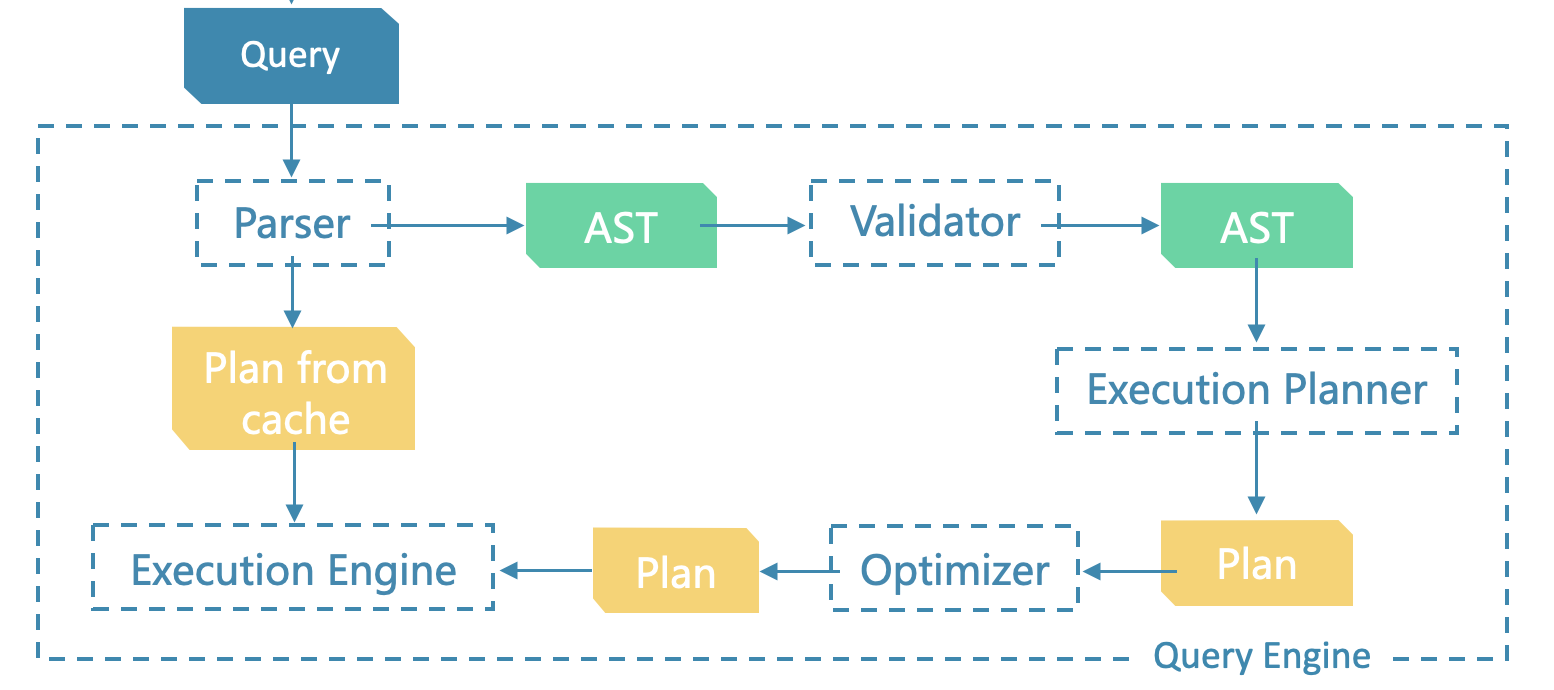
Planner 是执行计划(Execution Plan)生成器,它会根据 Validator 校验过、语义合法的查询语法树生成可供执行器(Executor)执行的未经优化的执行计划,而该执行计划会在之后交由 Optimizer 生成一个优化的执行计划,并最终交给 Executor 执行。执行计划由一系列节点(PlanNode)组成。
源码目录结构
src/planner
├── CMakeLists.txt
├── match/
├── ngql/
├── plan/
├── Planner.cpp
├── Planner.h
├── PlannersRegister.cpp
├── PlannersRegister.h
├── SequentialPlanner.cpp
├── SequentialPlanner.h
└── test
其中,Planner.h中定义了 SubPlan 的数据结构和 planner 的几个接口。
struct SubPlan {
// root and tail of a subplan.
PlanNode* root{nullptr};
PlanNode* tail{nullptr};
};
PlannerRegister 负责注册可用的 planner,Nebula Graph 目前注册了 SequentialPlanner、PathPlanner、LookupPlanner、GoPlanner、MatchPlanner。
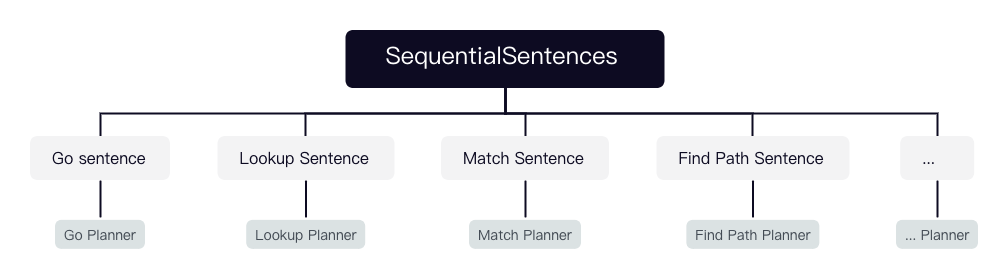
SequentialPlanner 对应的语句是 SequentialSentences,而 SequentialSentence 是由多个 Sentence 及间隔分号组成的组合语句。每个语句又可能是 GO/LOOKUP/MATCH等语句,所以 SequentialPlanner 是通过调用其他几个语句的 planner 来生成多个 plan,并用 Validator::appendPlan 将它们首尾相连。
match 目录定义了 openCypher 相关语句及子句(如 MATCH、UNWIND、WITH、RETURN、WHERE、ORDER BY、SKIP、LIMIT)的 planner 和 SubPlan 之间的连接策略等。SegmentsConnector 根据 SubPlan 之间的关系使用相应的连接策略(AddInput、addDependency、innerJoinSegments 等)将它们首尾连接成一个完整的 plan。
src/planner/match
├── AddDependencyStrategy.cpp
├── AddDependencyStrategy.h
├── AddInputStrategy.cpp
├── AddInputStrategy.h
├── CartesianProductStrategy.cpp
├── CartesianProductStrategy.h
├── CypherClausePlanner.h
├── EdgeIndexSeek.h
├── Expand.cpp
├── Expand.h
├── InnerJoinStrategy.cpp
├── InnerJoinStrategy.h
├── LabelIndexSeek.cpp
├── LabelIndexSeek.h
├── LeftOuterJoinStrategy.h
├── MatchClausePlanner.cpp
├── MatchClausePlanner.h
├── MatchPlanner.cpp
├── MatchPlanner.h
├── MatchSolver.cpp
├── MatchSolver.h
├── OrderByClausePlanner.cpp
├── OrderByClausePlanner.h
├── PaginationPlanner.cpp
├── PaginationPlanner.h
├── PropIndexSeek.cpp
├── PropIndexSeek.h
├── ReturnClausePlanner.cpp
├── ReturnClausePlanner.h
├── SegmentsConnector.cpp
├── SegmentsConnector.h
├── SegmentsConnectStrategy.h
├── StartVidFinder.cpp
├── StartVidFinder.h
├── UnionStrategy.h
├── UnwindClausePlanner.cpp
├── UnwindClausePlanner.h
├── VertexIdSeek.cpp
├── VertexIdSeek.h
├── WhereClausePlanner.cpp
├── WhereClausePlanner.h
├── WithClausePlanner.cpp
├── WithClausePlanner.h
├── YieldClausePlanner.cpp
└── YieldClausePlanner.h
ngql 目录定义了 nGQL 语句相关的 planner(如 GO、LOOKUP、FIND PATH)
src/planner/ngql
├── GoPlanner.cpp
├── GoPlanner.h
├── LookupPlanner.cpp
├── LookupPlanner.h
├── PathPlanner.cpp
└── PathPlanner.h
plan 目录定义了 7 大类,共计 100 多种 Plan Node。
src/planner/plan
├── Admin.cpp
├── Admin.h
├── Algo.cpp
├── Algo.h
├── ExecutionPlan.cpp
├── ExecutionPlan.h
├── Logic.cpp
├── Logic.h
├── Maintain.cpp
├── Maintain.h
├── Mutate.cpp
├── Mutate.h
├── PlanNode.cpp
├── PlanNode.h
├── Query.cpp
├── Query.h
└── Scan.h
部分节点说明:
- Admin 是数据库管理相关节点
- Algo 是路径、子图等算法相关节点
- Logic 是逻辑控制节点,如循环、二元选择等
- Maintain 是 schema 相关节点
- Mutate 是 DML 相关节点
- Query 是查询计算相关的节点
- Scan 是索引扫描相关节点
每个 PlanNode 在 Executor(执行器)阶段会生成相应的 executor,每种 executor 负责一个具体的功能。
eg. GetNeighbors 节点:
static GetNeighbors* make(QueryContext* qctx,
PlanNode* input,
GraphSpaceID space,
Expression* src,
std::vector<EdgeType> edgeTypes,
Direction edgeDirection,
std::unique_ptr<std::vector<VertexProp>>&& vertexProps,
std::unique_ptr<std::vector<EdgeProp>>&& edgeProps,
std::unique_ptr<std::vector<StatProp>>&& statProps,
std::unique_ptr<std::vector<Expr>>&& exprs,
bool dedup = false,
bool random = false,
std::vector<storage::cpp2::OrderBy> orderBy = {},
int64_t limit = -1,
std::string filter = "")
GetNeighbors 是存储层边的 kv 的语义上的封装:它根据给定类型边的起点,找到边的终点。在找边过程中,GetNeighbors 可以获取边上属性(edgeProps)。因为出边随起点存储在同一个 partition(数据切片)上,所以我们还可以方便地获得边上起点的属性(vertexProps)。
Aggregate 节点:
static Aggregate* make(QueryContext* qctx,
PlanNode* input,
std::vector<Expression*>&& groupKeys = {},
std::vector<Expression*>&& groupItems = {})
Aggregate 节点为聚合计算节点,它根据 groupKeys 作分组,根据 groupItems 做聚合计算作为组内值。
Loop 节点:
static Loop* make(QueryContext* qctx,
PlanNode* input,
PlanNode* body = nullptr,
Expression* condition = nullptr);
loop 为循环节点,它会一直执行 body 到最近一个 start 节点之间的 PlanNode 片段直到 condition 值为 false。
InnerJoin 节点:
static InnerJoin* make(QueryContext* qctx,
PlanNode* input,
std::pair<std::string, int64_t> leftVar,
std::pair<std::string, int64_t> rightVar,
std::vector<Expression*> hashKeys = {},
std::vector<Expression*> probeKeys = {})
InnerJoin 节点对两个表(Table、DataSet)做内联,leftVar 和 rightVar 分别用来引用两个表。
入口函数
planner 入口函数是 Validator::toPlan
Status Validator::toPlan() {
auto* astCtx = getAstContext();
if (astCtx != nullptr) {
astCtx->space = space_;
}
auto subPlanStatus = Planner::toPlan(astCtx);
NG_RETURN_IF_ERROR(subPlanStatus);
auto subPlan = std::move(subPlanStatus).value();
root_ = subPlan.root;
tail_ = subPlan.tail;
VLOG(1) << "root: " << root_->kind() << " tail: " << tail_->kind();
return Status::OK();
}
具体步骤
1.调用 getAstContext()
首先调用 getAstContext() 获取由 validator 校验并重写过的 AST 上下文,这些 context 相关数据结构定义在 src/context中。
src/context/ast
├── AstContext.h
├── CypherAstContext.h
└── QueryAstContext.h
struct AstContext {
QueryContext* qctx; // 每个查询请求的 context
Sentence* sentence; // query 语句的 ast
SpaceInfo space; // 当前 space
};
CypherAstContext 中定义了 openCypher 相关语法的 ast context,QueryAstContext 中定义了 nGQL 相关语法的 ast context。
2.调用Planner::toPlan(astCtx)
然后调用 Planner::toPlan(astCtx),根据 ast context 在 PlannerMap 中找到语句对应注册过的 planner,然后生成相应的执行计划。
每个 Plan 由一系列 PlanNode 组成,PlanNode 之间有执行依赖和数据依赖两大关系。
-
执行依赖:从执行顺序上看,plan 是一个有向无环图,节点间的依赖关系在生成 plan 时确定。在执行阶段,执行器会对每个节点生成一个对应的算子,并且从根节点开始调度,此时发现此节点依赖其他节点,就先递归调用依赖的节点,一直找到没有任何依赖的节点(Start 节点),然后开始执行,执行此节点后,继续执行此节点被依赖的其他节点,一直到根节点为止。
-
数据依赖:节点的数据依赖一般和执行依赖相同,即来自前面一个调度执行的节点的输出。有的节点,如:InnerJoin 会有多个输入,那么它的输入可能是和它间隔好几个节点的某个节点的输出。
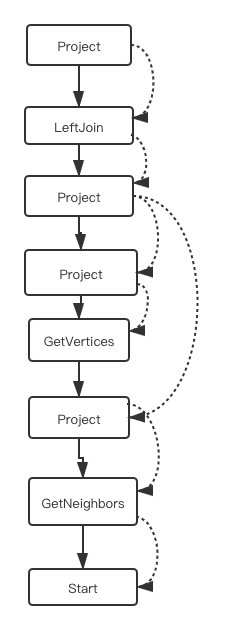
(实线为执行依赖,虚线为数据依赖)
举个例子
我们以 MatchPlanner 为例,来看一个执行计划是如何生成的:
语句:
MATCH (v:player)-[:like*2..4]-(v2:player)\
WITH v, v2.age AS age ORDER BY age WHERE age > 18\
RETURN id(v), age
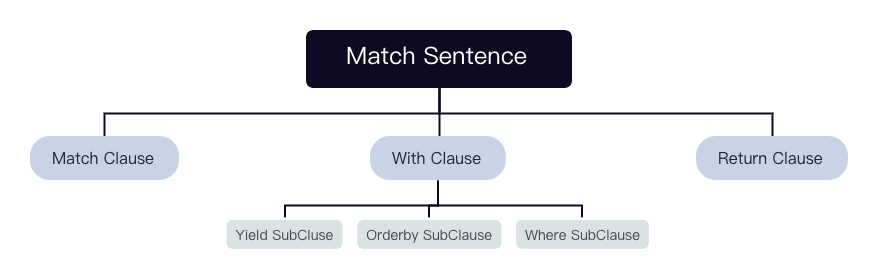
该语句经过 MatchValidator 的校验和重写后会输出一个 context 组成的 tree。
=>
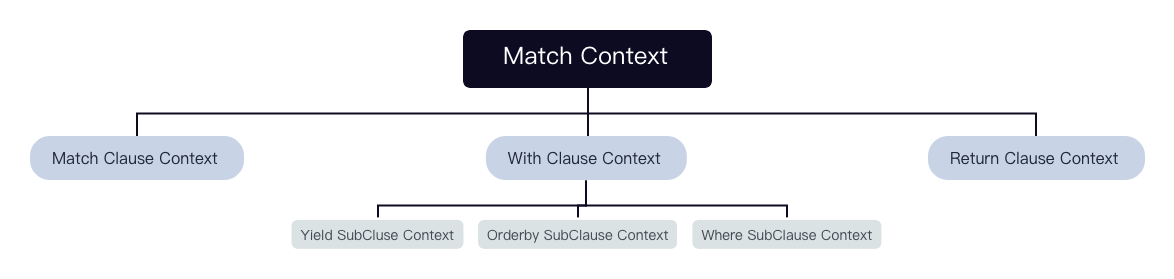
每个 Clause 及 SubClause 对应一个 context:
enum class CypherClauseKind : uint8_t {
kMatch,
kUnwind,
kWith,
kWhere,
kReturn,
kOrderBy,
kPagination,
kYield,
};
struct CypherClauseContextBase : AstContext {
explicit CypherClauseContextBase(CypherClauseKind k) : kind(k) {}
virtual ~CypherClauseContextBase() = default;
const CypherClauseKind kind;
};
struct MatchClauseContext final : CypherClauseContextBase {
MatchClauseContext() : CypherClauseContextBase(CypherClauseKind::kMatch) {}
std::vector<NodeInfo> nodeInfos; // pattern 中涉及的顶点信息
std::vector<EdgeInfo> edgeInfos; // pattern 中涉及的边信息
PathBuildExpression* pathBuild{nullptr}; // 构建 path 的表达式
std::unique_ptr<WhereClauseContext> where; // filter SubClause
std::unordered_map<std::string, AliasType>* aliasesUsed{nullptr}; // 输入的 alias 信息
std::unordered_map<std::string, AliasType> aliasesGenerated; // 产生的 alias 信息
};
...
然后:
1.找语句 planner
找到对应语句的 planner,该语句类型为 Match。在 PlannersMap 中找到该语句的 planner MatchPlanner。
2.生成 plan
调用 MatchPlanner::transform 方法生成 plan:
StatusOr<SubPlan> MatchPlanner::transform(AstContext* astCtx) {
if (astCtx->sentence->kind() != Sentence::Kind::kMatch) {
return Status::Error("Only MATCH is accepted for match planner.");
}
auto* matchCtx = static_cast<MatchAstContext*>(astCtx);
std::vector<SubPlan> subplans;
for (auto& clauseCtx : matchCtx->clauses) {
switch (clauseCtx->kind) {
case CypherClauseKind::kMatch: {
auto subplan = std::make_unique<MatchClausePlanner>()->transform(clauseCtx.get());
NG_RETURN_IF_ERROR(subplan);
subplans.emplace_back(std::move(subplan).value());
break;
}
case CypherClauseKind::kUnwind: {
auto subplan = std::make_unique<UnwindClausePlanner>()->transform(clauseCtx.get());
NG_RETURN_IF_ERROR(subplan);
auto& unwind = subplan.value().root;
std::vector<std::string> inputCols;
if (!subplans.empty()) {
auto input = subplans.back().root;
auto cols = input->colNames();
for (auto col : cols) {
inputCols.emplace_back(col);
}
}
inputCols.emplace_back(unwind->colNames().front());
unwind->setColNames(inputCols);
subplans.emplace_back(std::move(subplan).value());
break;
}
case CypherClauseKind::kWith: {
auto subplan = std::make_unique<WithClausePlanner>()->transform(clauseCtx.get());
NG_RETURN_IF_ERROR(subplan);
subplans.emplace_back(std::move(subplan).value());
break;
}
case CypherClauseKind::kReturn: {
auto subplan = std::make_unique<ReturnClausePlanner>()->transform(clauseCtx.get());
NG_RETURN_IF_ERROR(subplan);
subplans.emplace_back(std::move(subplan).value());
break;
}
default: { return Status::Error("Unsupported clause."); }
}
}
auto finalPlan = connectSegments(astCtx, subplans, matchCtx->clauses);
NG_RETURN_IF_ERROR(finalPlan);
return std::move(finalPlan).value();
}
match 语句可能由多个 MATCH/UNWIND/WITH/RETURN Clause 组成,所以在 transform 中,根据 Clause 的类型,直接调用相应的 ClausePlanner 生成 SubPlan,最后再由 SegmentsConnector 依据各种连接策略将它们连接起来。
在我们的示例语句中,
第一个 Clause 是 Match Clause: MATCH (v:player)-[:like*2..4]-(v2:player),所以会调用 MatchClause::transform 方法:
StatusOr<SubPlan> MatchClausePlanner::transform(CypherClauseContextBase* clauseCtx) {
if (clauseCtx->kind != CypherClauseKind::kMatch) {
return Status::Error("Not a valid context for MatchClausePlanner.");
}
auto* matchClauseCtx = static_cast<MatchClauseContext*>(clauseCtx);
auto& nodeInfos = matchClauseCtx->nodeInfos;
auto& edgeInfos = matchClauseCtx->edgeInfos;
SubPlan matchClausePlan;
size_t startIndex = 0;
bool startFromEdge = false;
NG_RETURN_IF_ERROR(findStarts(matchClauseCtx, startFromEdge, startIndex, matchClausePlan));
NG_RETURN_IF_ERROR(
expand(nodeInfos, edgeInfos, matchClauseCtx, startFromEdge, startIndex, matchClausePlan));
NG_RETURN_IF_ERROR(projectColumnsBySymbols(matchClauseCtx, startIndex, matchClausePlan));
NG_RETURN_IF_ERROR(appendFilterPlan(matchClauseCtx, matchClausePlan));
return matchClausePlan;
}
该 transform 方法又分为以下几个步骤:
- 寻找拓展的起点:
目前有三个寻找起点的策略,由 planner 注册在 startVidFinders 里:
// MATCH(n) WHERE id(n) = value RETURN n
startVidFinders.emplace_back(&VertexIdSeek::make);
// MATCH(n:Tag{prop:value}) RETURN n
// MATCH(n:Tag) WHERE n.prop = value RETURN n
startVidFinders.emplace_back(&PropIndexSeek::make);
// seek by tag or edge(index)
// MATCH(n: tag) RETURN n
// MATCH(s)-[:edge]->(e) RETURN e
startVidFinders.emplace_back(&LabelIndexSeek::make);
这三个策略中,VertexIdSeek 最佳,可以确定具体的起点 VID;PropIndexSeek 次之,会被转换为一个附带属性 filter 的 IndexScan;LabelIndexSeek 会被转换为一个 IndexScan。
findStarts 函数会对每个寻找起点策略,分别遍历 match pattern 中的所有节点信息,直到找到一个可以作为起点的 node,并生成相应的找起点的 Plan Nodes。
示例语句的寻点策略是 LabelIndexScan,确定的起点是 v。最终生成一个 IndexScan 节点,索引为 player 这个 tag 上的索引。
- 根据起点及 match pattern,进行多步拓展:
示例中句子的 match pattern 为:(v:player)-[:like*1..2]-(v2:player),以 v 为起点,沿着边 like 拓展一到二步,终点拥有 player 类型 tag。
先做拓展:
Status Expand::doExpand(const NodeInfo& node, const EdgeInfo& edge, SubPlan* plan) {
NG_RETURN_IF_ERROR(expandSteps(node, edge, plan));
NG_RETURN_IF_ERROR(filterDatasetByPathLength(edge, plan->root, plan));
return Status::OK();
}
多步拓展会生成 Loop 节点,loop body 为 expandStep 意为根据给定起点拓展一步,拓展一步需要生成 GetNeighbors 节点。每一步拓展的终点作为后面一步拓展的起点,一直循环下去,直到达到 pattern 中指定的最大步数。
在做第 M 步拓展时,以前面得到的长度为 M-1 的 path 的终点作为本次拓展的起点,向外延伸一步,并根据拓展的结果构建一个以边的起点和边本身组成的步长为 1 的 path,然后将该步长为 1 的 path 与前面的步长为 M-1 的 path 做一个 InnerJoin 得到步长为 M 的一组 path。
再调用对这组 path 做过滤,去除掉有重复边的 path(openCypher 路径的拓展不允许有重复边),最后将 path 的终点输出作为下一步拓展的起点。下一步拓展继续做上述步骤,直至达到最大中指定的最大步数。
loop 之后会生成 UnionAllVersionVar 节点,将 loop body 每次循环构建出的步长分别为 1 到 M 步的 path 合并起来。filterDatasetByPathLength()函数会生成一个 Filter 节点过滤掉步长小于 match pattern 中指定最小步数的 path。
最终得到的 path 形如(v)-like-()-e-(v)-?,还缺少最后一步的终点的属性信息。因此,我们还需要生成一个 GetVertices 节点,然后将获取到的终点与之前的 M 步 path 再做一个 InnerJoin,得到的就是符合 match pattern 要求的 path 集合了!
match 多步拓展原理会在 Variable Length Pattern Match 一文中有更详细的解释。
// Build Start node from first step
SubPlan loopBodyPlan;
PlanNode* startNode = StartNode::make(matchCtx_->qctx);
startNode->setOutputVar(firstStep->outputVar());
startNode->setColNames(firstStep->colNames());
loopBodyPlan.tail = startNode;
loopBodyPlan.root = startNode;
// Construct loop body
NG_RETURN_IF_ERROR(expandStep(edge,
startNode, // dep
startNode->outputVar(), // inputVar
nullptr,
&loopBodyPlan));
NG_RETURN_IF_ERROR(collectData(startNode, // left join node
loopBodyPlan.root, // right join node
&firstStep, // passThrough
&subplan));
// Union node
auto body = subplan.root;
// Loop condition
auto condition = buildExpandCondition(body->outputVar(), startIndex, maxHop);
// Create loop
auto* loop = Loop::make(matchCtx_->qctx, firstStep, body, condition);
// Unionize the results of each expansion which are stored in the firstStep node
auto uResNode = UnionAllVersionVar::make(matchCtx_->qctx, loop);
uResNode->setInputVar(firstStep->outputVar());
uResNode->setColNames({kPathStr});
subplan.root = uResNode;
plan->root = subplan.root;
- 输出 table,确定 table 的列名:
将 match pattern 中所有出现的具名符号作为 table 列名,生成一个 table,以供后续子句使用。这会生成一个 Project 节点。
第二个 clause 是 WithClause,调用 WithClause::transform 生成 SubPlan:
WITH v, v2.age AS age ORDER BY age WHERE age > 18
该 WITH 子句先 yield v 和 v2.age 两列作为一个 table,然后以 age 作为 sort item 进行排序,然后对排序后的 table 作 filter。
YIELD 部分会生成一个 Project 节点,ORDER BY 部分会生成一个 Sort 节点,WHERE 部分对应一个会生成一个 Filter 节点。
第三个 clause 是 Return Clause,会生成一个 Project 节点。
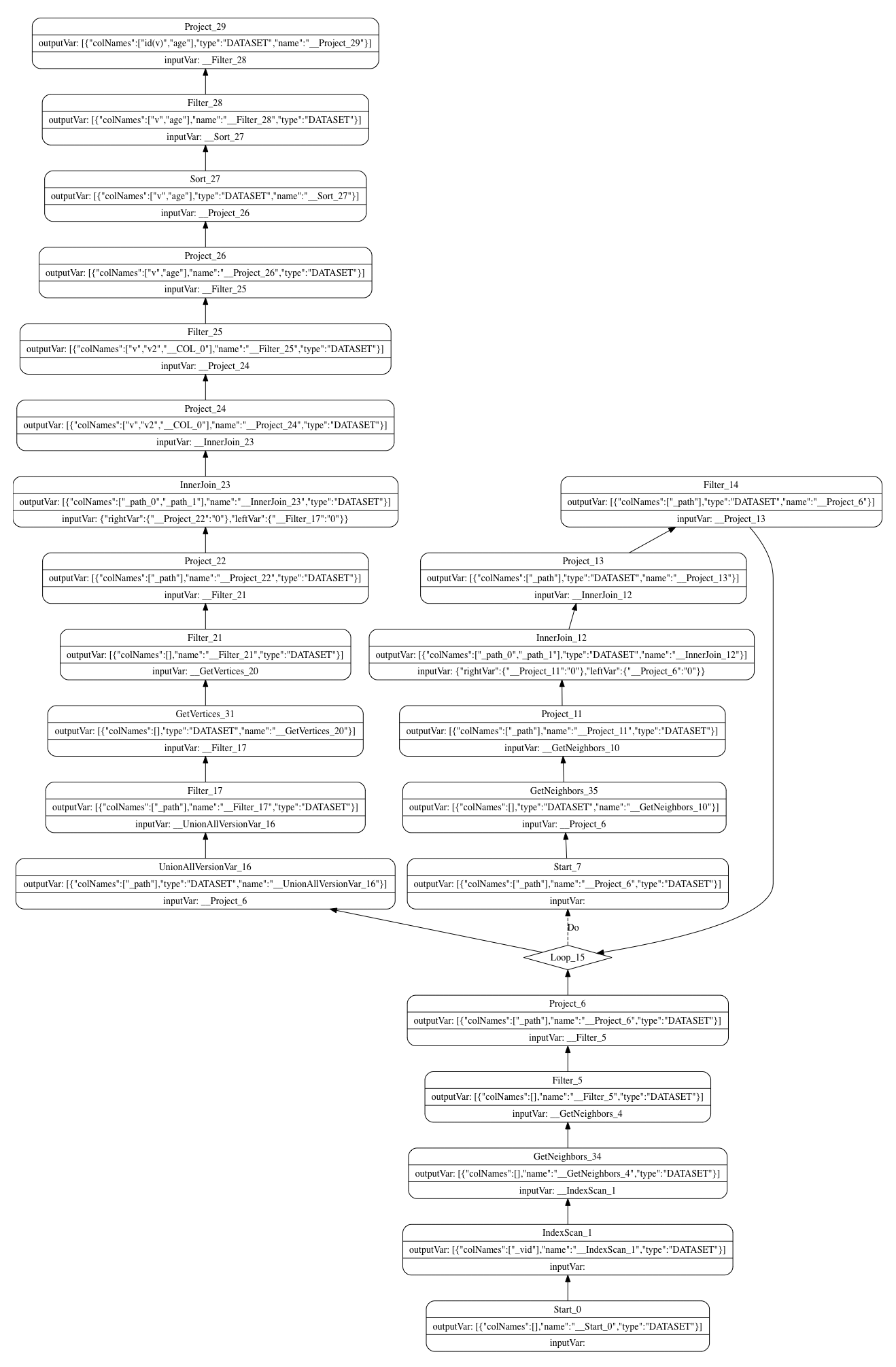
RETURN id(v), age
最终整合语句完整的的执行计划如下图:
以上为本篇文章的介绍内容。
交流图数据库技术?加入 Nebula 交流群请先填写下你的 Nebula 名片,Nebula 小助手会拉你进群~~
标签:std,Vol.03,Planner,RETURN,auto,源码,subplan,cpp,节点 来源: https://www.cnblogs.com/nebulagraph/p/15333847.html