线性二次型控制器(LQR)——轨迹跟踪器
作者:互联网
1 概念
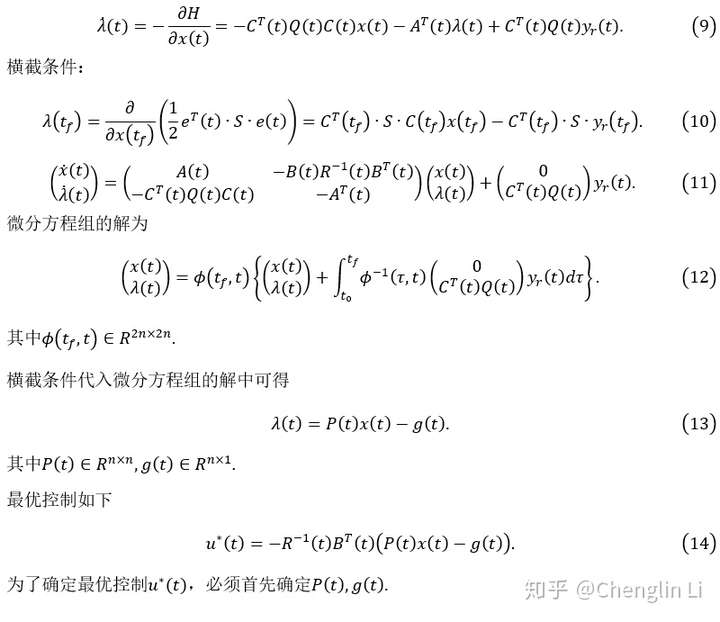
2 线性时变系统的跟踪问题

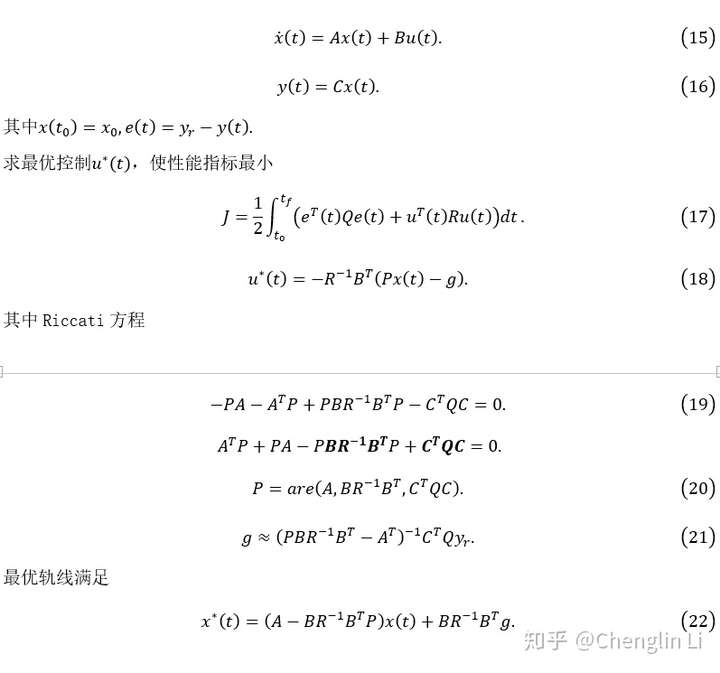
3 线性定常系统的跟踪问题
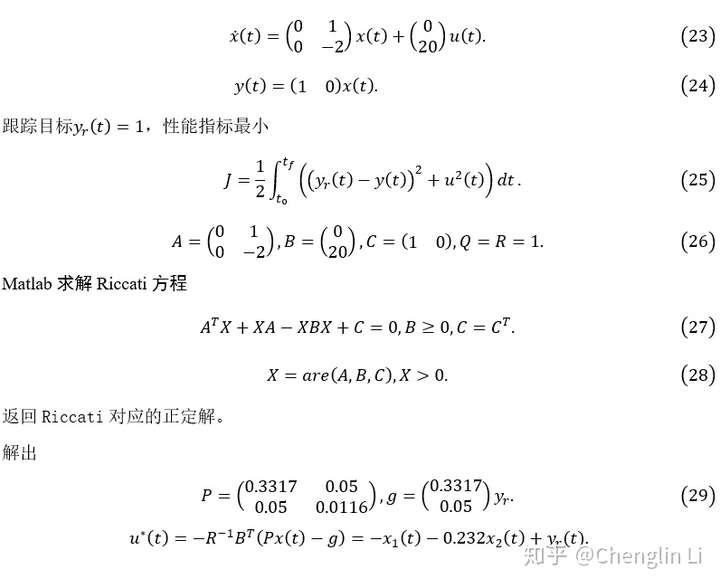
4 实例分析
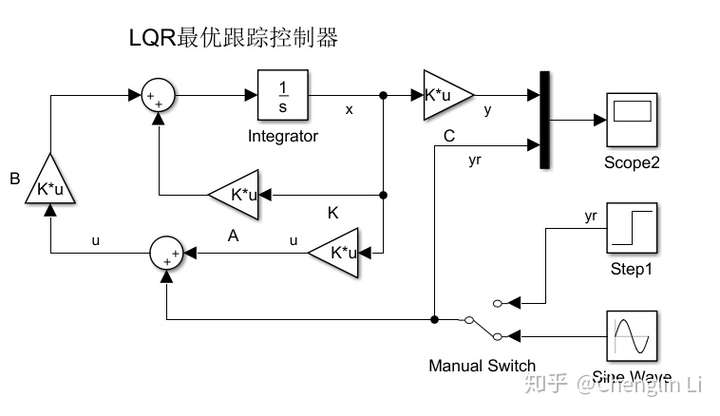
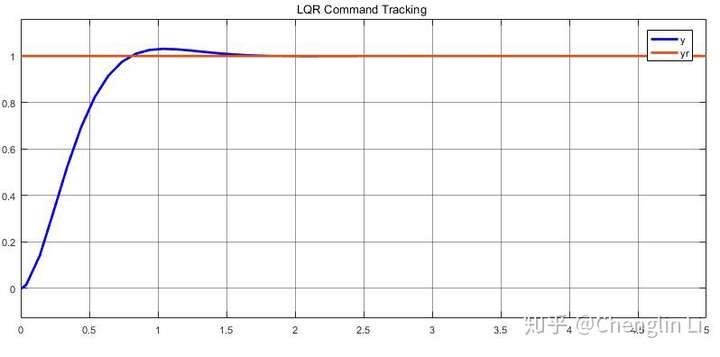
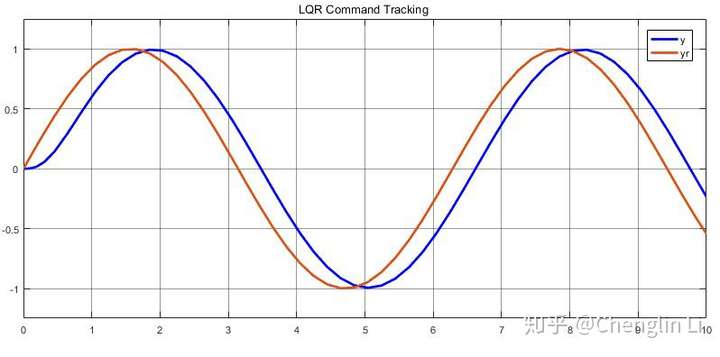
5 仿真实验
6 计算程序
1 clear 2 clc 3 A=[0,1; 0,-2]; 4 B=[0;20]; 5 C=[1,0] ; 6 Q=1; 7 R=1; 8 yr=1; 9 10 syms x1 x2 11 P=are( A, B*inv(R)*B', C'*Q*C ) 12 13 g=inv(P*B*inv(R)*B'-A')*C'*Q*yr 14 15 u=-inv(R)*B'*(P*[x1; x2]-g)
标签:控制器,yr,inv,LQR,x2,跟踪器,线性,x1,跟踪 来源: https://www.cnblogs.com/zhj868/p/13834109.html