如何看待商汤的Deformable DETR?能否取代Faster-RCNN范式?
作者:互联网
计算机视觉 目标检测 物体识别 深度学习(Deep Learning) 卷积神经网络(CNN)
如何看待商汤的Deformable DETR?能否取代Faster-RCNN范式?
Deformable DETR比DETR训练快10x,能否取代Faster-RCNN目标检测范式呢?
DETRarxiv.orgDeformable DETRarxiv.org
9 个回答
Deformable DETR主要是将之前DETR直接使用特征图进行训练变为注意力之后的特征图。将之前DETR花费时间学习到的Sparse Att map快速得到。
无意义内容分割线
可变性att部分:
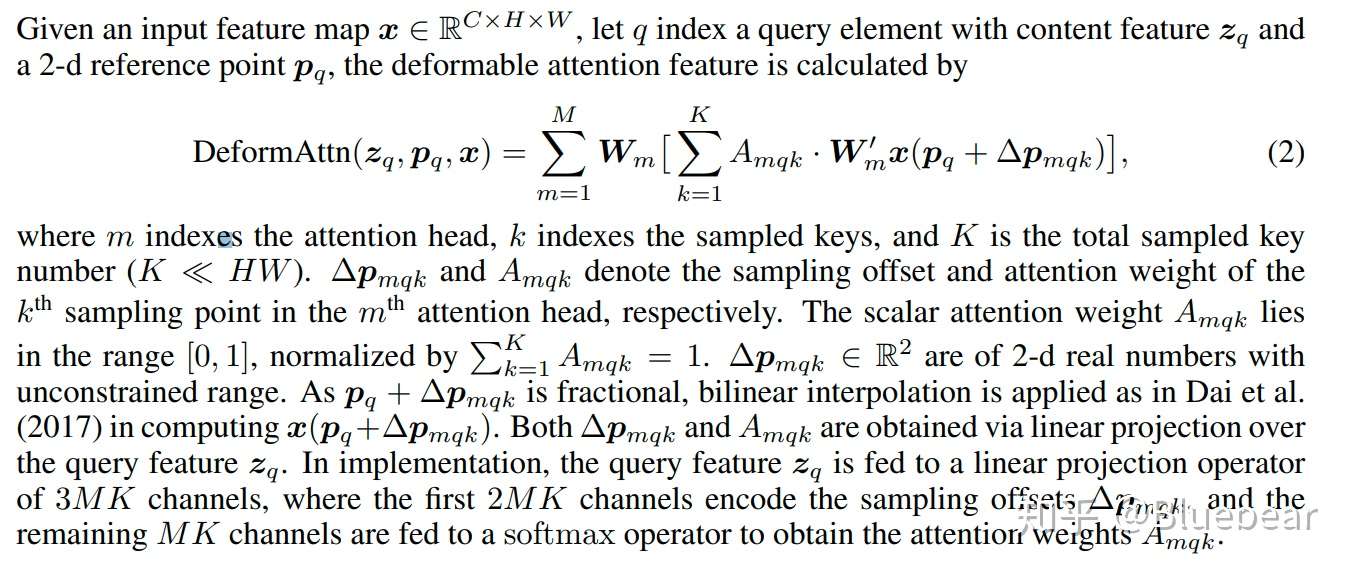
可变形注意力Query部分是特征图线性投影后的结果,元是特征图直接预测offset(2*核元素数),权重(核元素数,后面过Softmax归一化)。Key则是原始特征图。对于每个PIXEL预测周围PIXEL特征之和。相对可变形卷积可以认为是卷积Kernel的参数按位置变化了。
多尺度可变形att:

加入了多层尺度att,也就是考虑不同尺度,因为meshgrid归一化了,坐标其实通用。
可变形TransformerEncoder部分:
用上述多尺度可变形att代替DETR transformer att部分(3尺度,不带FPN,多尺度可变形att自带融合多尺度加成)。加入可学习尺度嵌入和固定的位置嵌入。
可变形TransformerDecoder部分:
cross-att使用多尺度可变att,self-att保持。 预想参考点是目标中心,然后Decoder俺中心信息去预测box类别。
补充优化:迭代bbox结果优化和两级预测。
预测部分是用了K为4 M为8。也就是单个尺度的采样其实很少,也是为了省空间。往可解释性上说,感觉上多层ATT其实是在某个目标周围多次采样(试探),然后确认是不是在目标中心,同时边界大概在哪。多次试探后确认,高尺度决定个大概后,低尺度精细化?感觉这个Offset多次猜?
实现倒是简单,这是一个M=1情况下的可变形Att的实现。如
@立夏之光 所说,K=1就是个Warp,如果要保证稀疏,所有目标区域都要往Reference Point集中?如果作者能给最后激活图看看也许更好。
class DFMAtt(nn.Module):
def __init__(self, in_ch,out_ch, k):
super().__init__()
self.conv = nn.Conv2d(in_ch, out_ch, 1, 1, 0,bias=True)
self.k=k
self.out_ch=out_ch
offset_list=[]
for x in range(k):
conv = nn.Conv2d(in_ch, 2, 1, 1, 0,bias=True)
offset_list.append(conv)
self.offset_conv=nn.ModuleList(offset_list)
self.weight_conv= nn.Sequential(nn.Conv2d(in_ch, k, 1, 1, 0,bias=True),nn.Softmax(1))
def forward(self,input):
b, c, h, w = input.size()
proj_feat=self.conv(input)
offsets=[]
for x in range(self.k):
flow = self.offset_conv[x](input)
offsets.append(flow)
offsetweights= torch.repeat_interleave(self.weight_conv(input),self.out_ch,1)
feats=[]
for x in range(self.k):
flow=offsets[x]
flow = flow.permute(0, 2, 3, 1)
grid_y, grid_x = torch.meshgrid(torch.arange(0, h), torch.arange(0, w))
grid = torch.stack((grid_x, grid_y), 2).float()
grid.requires_grad = False
grid = grid.type_as(proj_feat)
vgrid = grid + flow
vgrid_x = 2.0 * vgrid[:, :, :, 0] / max(w - 1, 1) - 1.0
vgrid_y = 2.0 * vgrid[:, :, :, 1] / max(h - 1, 1) - 1.0
vgrid_scaled = torch.stack((vgrid_x, vgrid_y), dim=3)
feat = F.grid_sample(proj_feat, vgrid_scaled, mode='bilinear', padding_mode='zeros')
feats.append(feat)
feat=torch.cat(feats,1)*offsetweights
feat= sum(torch.split(feat,self.out_ch,1))
return feat 知乎
发现更大的世界
打开
知乎
发现更大的世界
打开
 Chrome
继续
Chrome
继续
手码抢答。
开启了人人(并不)都可以玩得起 DETR 的时代,contribution 自然是相当大。如果 DETR 能引领一个大发展,那么本文之于 DETR,应该相当于 ResNet 之于 AlexNet。
和
@余昌黔 大佬的 Representative Graph Neural Network 在思路上有很强的一致性。都是对全连接 Transformer 的计算量进行优化,为每个 query 采样 K 个 key-value pair。考虑到 feature map 上的冗余,采样点能够很好的概括关键信息。不过私以为最大的性能收益,来源于这一方法可以自然地引入多尺度特征。
个人也有个疑问之处,Table 2的第三行已经可以吊打 DETR(Table 1第四五行)。这里 K=1 时,方法退化为
@大大拉头 Semantic flow 里的 warping 操作。跟据经验,这个操作无法取得如此大的增益。希望作者们能来介绍下,实现还做了哪些改进呐。没有 MS input 的情况下,是用了 DC5 吗?
最近 CV 领域 transformer 相关文章频出,很多人评论 NLP 对 CV 输出。这点是不太赞同的。君不见 CV 领域 attention 文章频出,甚至被视为划水(???)。NLP 里 Sparse Transformer, LinFormer 赞誉一片。但其实 CV 领域早就屡见不鲜。这里可以参见我写过的知乎文章和回答。Transformer 就是 Attention 的一种。捧 Transformer 损 Attention,是本领域最大的乌龙了
编辑于 10-09 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
先引用一下之前关于DETR的分析吧
王Sr:如何看待End-to-End Object Detection with Transformers?www.zhihu.com
我们可以认为之前的单/多阶段算法、anchor based/free的方法都是local的方法,detr算是完全global的方法,而本文算是重新将detr拉回到了local的思路上,也借此加快了收敛速度。
接下来再对本文做个拆解:
首先本文提出将原始detr的encoder部分换成deformable attention module,这个过程可以理解成是sparse transformer,当然也可以单纯理解成是基于deformable+self attention的fpn的改进(当然这种操作似乎之前也见过,segmentation里的semantic flow,还有VID领域LSTS)
decoder部分iterative bbox refinement和two stage的思路看起来就很像是relationnet,本文没有引用这篇还是有些奇怪
而经过了上面这两点的修改,其实本文和detr的相似度就低了很多,甚至完全可以看做是之前纯local的方式的改进,区别就在于query(之前的local的方法中anchor也可以理解成是一种query)和损失函数的设置。
从这个角度说,其实会引出一个更值得探讨的问题: 检测任务我们究竟需要怎样的query?究竟多少query足够很好的完成检测任务?(detr中只有100个,而之前的方法动辄需要几千个anchor)。这个问题如果可以得到很好的解决,目标检测领域可能会迎来真正的革新。
发布于 10-10 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
DETR暴力搜索有效特征,Deformable DETR有目的地搜索有效特征,自然高效。
发布于 6 小时前 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
有完整代码吗?希望早日开源
发布于 10-11 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
泻药
感觉本质上还是高质量的local patch的提升:)
发布于 10-09 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
取代的话,detr就取代了。其实性能啥的提上来是迟早的,fb给的baseline毕竟啥也没加。deformable确实是最大创新,如题所示。然而,对于大多数像我这样的穷逼来说,玩不玩得起其实也不是看训练速度,速度慢我可以等,显存不够我只能砸锅炉,并且推理速度也还是捉急。
目测最大瓶颈在六层encoder layer,六层一丢(或者用更好的方式代替),显存掉一大半,跑起来估计得比yolo快。谁要是能搞定这个或许比这篇文章更 牛(逃
编辑于 10-09 真诚赞赏,手留余香 还没有人赞赏,快来当第一个赞赏的人吧! 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
不能,整体直接预测的话,可解释性和debug方面会更差,不利于工业使用,而且detr本身性能已经问题不大了,后续的工作也只能算是针对性优化了。
发布于 13 小时前 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
没看过,应该属于优化过程中的产物,最早的是fb,大概率不是。
编辑于 10-10 继续浏览内容
知乎
发现更大的世界
打开
Chrome
继续
广告
相关问题
Faster-RCNN会不会被YOLOv3取代? 7 个回答
如何评价rcnn、fast-rcnn和faster-rcnn这一系列方法? 24 个回答
py-faster-rcnn代码中的bbox_inside_weights的作用是什么? 6 个回答
目标检测SSD相对于YOLO与faster-RCNN做了哪些改进?效果如何呢? 7 个回答
如何看待超越mask-rcnn的blendmask?谁会是下一个mask? 7 个回答
广告
标签:10,知乎,Faster,Deformable,self,ch,grid,RCNN,DETR 来源: https://www.cnblogs.com/cx2016/p/13812583.html