cold diffusion的个人理解
作者:互联网
背景 和 介绍
最近阅读了 Cold Diffusion: Inverting Arbitrary Image Transforms Without Noise,做了个简短的汇报,写一篇博客记录一下。
目前的diffusion model都是基于高斯噪声在进行扩散,其可被理解为使用Langeviin dynamics在数据范围游走。
对于反向生成而言,就是从一个噪声,一点点的降噪到几乎没有噪声的状态。
本文探索了一种新的生成方式,其并不依赖于高斯噪声
宏观视角看cold diffusion
先考虑DDPM:
其模型关键有这么几步:
- 给图像加随机高斯噪声,得到不同t时刻对应的\(x_t\),可推得\(x_T\)符合标准高斯分布
- 从标准高斯分布中取一个样本,反向执行加噪操作,最后生成\(x_{0}\)
其实也可以理解成这个过程:
- 给图像进行退化操作,得到不同t时刻对应的\(x_t\),可推得\(x_T\)符合某个分布
- 从\(x_T\) 符合的分布中取一个样本,反向前向的退化过程从而生成\(x_{0}\)
换言之,如果我想要对图像进行其他的退化操作,就一定要:
- 知道\(x_T\) 符合的分布
- 有一种很好的反向sampling的计算方式。
在DDPM中,图像的加噪围绕噪声,降噪围绕噪声,网络的训练目标是去近似噪声。噪声贯穿始终。
而此时因为模型需要可以适用于任何的变换,相当于需要站在一个更高的层次看diffusion model,自然不能将关注点放在具体的变换方式上,因此需要一个采取任何变换时都公有的存在来表示模型的退化变化、训练目标。
很容易想到,既然不能在“退化方式”的基础上建模,那就关注数据分布本身的情况\(x_0,x_1,x_2...x_T\)。在这个基础上,我们只要知道,正向退化时会把数据弄成什么样,反向恢复时,数据要如何一步步拟合到数据集的情况。同时,神经网络模型只能用于预测\(x_0\)。
因此,引入如下记号:
图像退化算子(image degradation operator),
图像恢复算子(image restoration operator),
两者定义如下:其中将 t 理解为图像的受损程度(severity)
让模型去预测\(x_0\) ,用 \(\bar{x_0}与x_0\)的范数来衡量模型的预测效果。

加一些些细节分析
关于图像的退化操作:
-
对于DDPM,退化过程可以时每次随机加噪,因为数学推导告诉我,最后的分布一定是符合标准高斯分布的。
所以我们有:
-
对于其他的退化方式,由于生成样本时需要从\(x_T\) 符合的分布中取样本,也就是说,我们需要给图像退化过程增加限定,使得最后\(x_T\) 分布是已知的。
采用其它的图像退化方式,最终的分布往往是足够简单但是不可事先确认(例如:采用模糊的方式退化图像时,知道最后的分布是一张纯色图)
关于图像恢复操作:
作者提出了两种算法:
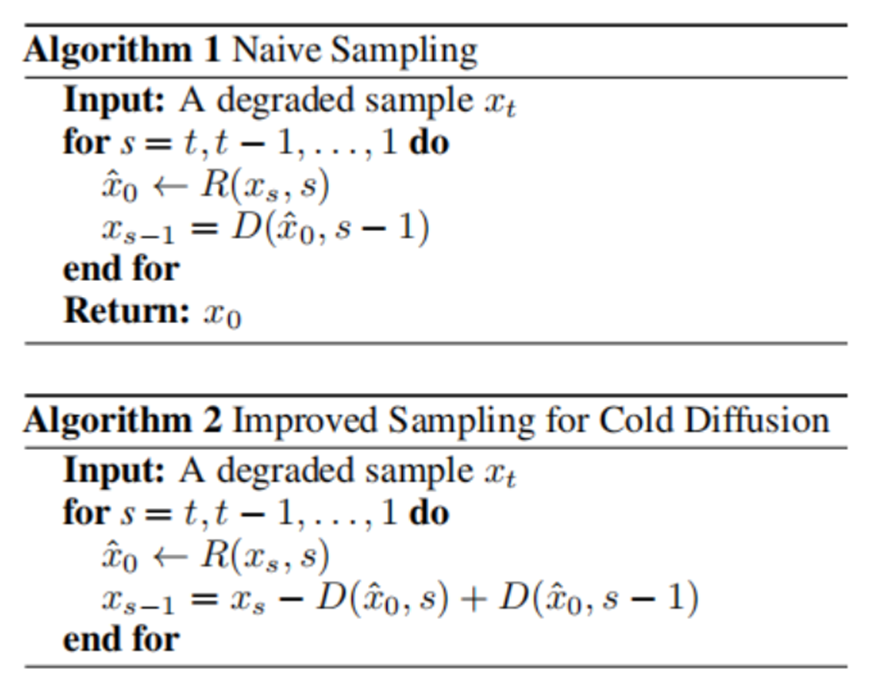
Algorithm 1:
存在较大的问题,如果恢复算子R可以完美恢复至\(x_0\),那么显然没有问题。
但其恢复一般不是完美符合的,每一次使用R都会增大误差,那么一来一回偏差就会变大。
同时作者指出:algorithm1可以很好地适用于基于噪声的扩散,可能是因为恢复算子R已经被训练来纠正其输入中的误差。但其应对cold diffusion这种变化较为的情况时,效果较差。
Algorithm 2:
其相比于algorithm1,其具有更好的数学特性,尤其是下面一类的线性变换。

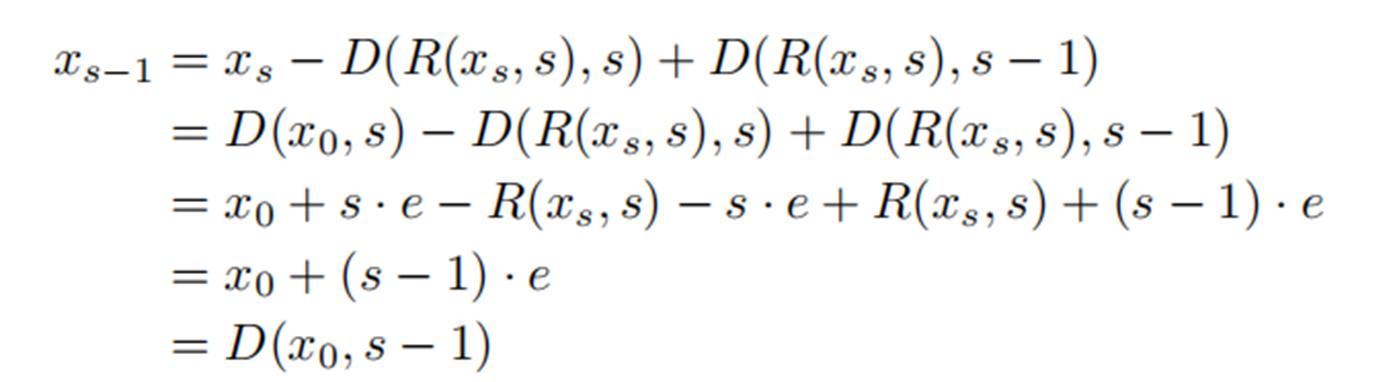
显然在这种变换时,即便R没有很好的拟合,也能有很好的效果
看一个例子
将另一个数据集的 数据分布作为\(x_T\) 的分布进行处理。此例中用的是celebA和APHQ。\(人脸\to 动物脸 \to 人脸\)

图像退化过程:

这个图像退化的方式其实就是DDPM中加噪的公式,只是\(z\) 代表的含义不一样。
加载数据:
# 此处的dl借助了cycle形成了无限循环的迭代器。
# dl1为celebA数据集, dl2为APHQ数据集(动物脸)
self.dl1 = cycle(data.DataLoader(self.ds1, batch_size = train_batch_size, shuffle=shuffle, pin_memory=True, num_workers=16, drop_last=True))
self.dl2 = cycle(data.DataLoader(self.ds2, batch_size = train_batch_size, shuffle=shuffle, pin_memory=True, num_workers=16, drop_last=True))
训练过程:
并不是一个epoch中训练整个数据集,而是规定了一个epoch中训练的次数,循环取数据进行训练
# 与常规的训练不同,因为训练方式为限定一个epoch中的训练次数,一次训练就会取一个batch_size的数据进行训练
def train(self):
backwards = partial(loss_backwards, self.fp16)
acc_loss = 0
while self.step < self.train_num_steps: # 相当于epoch
for i in range(self.gradient_accumulate_every): # 规定了一个epoch中的训练次数
data_1 = next(self.dl1).cuda() # 取数据是采用循环取数据的方式实现的
data_2 = next(self.dl2).cuda()
loss = torch.mean(self.model(data_1, data_2))
# loss的计算
def p_losses(self, x_start, x_end, t):
b, c, h, w = x_start.shape
if self.train_routine == 'Final': # 不用管
x_mix = self.q_sample(x_start=x_start, x_end=x_end, t=t) # 图像退化后的结果
x_recon = self.denoise_fn(x_mix, t) # 使用R恢复后的图像结果
# 两种不同的loss计算方法
if self.loss_type == 'l1':
loss = (x_start - x_recon).abs().mean()
elif self.loss_type == 'l2':
loss = F.mse_loss(x_start, x_recon)
else:
raise NotImplementedError()
return loss
# 具体的加噪过程 q_sample
def q_sample(self, x_start, x_end, t): # x_start训练图像 x_end为加噪的图片
# simply use the alphas to interpolate
return (
extract(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start +
extract(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape) * x_end
)
sampling:
# sample的全过程
def test_from_data(self, extra_path, s_times=None):
batches = self.batch_size
og_img = next(self.dl2).cuda() # 从APFQ数据集中随机取出一张图片
X_0s, X_ts = self.ema_model.module.all_sample(batch_size=batches, img=og_img, times=s_times)
# 此为实际执行降噪过程的函数
@torch.no_grad()
def all_sample(self, batch_size=16, img=None, t=None, times=None, eval=True):
if eval:
self.denoise_fn.eval()
if t == None:
t = self.num_timesteps
X1_0s, X2_0s, X_ts = [], [], []
while (t):
step = torch.full((batch_size,), t - 1, dtype=torch.long).cuda()
x1_bar = self.denoise_fn(img, step) # 应用训练的网络,直接得到的初始图像
x2_bar = self.get_x2_bar_from_xt(x1_bar, img, step) # 图片退化时的图,即z
X1_0s.append(x1_bar.detach().cpu())
X2_0s.append(x2_bar.detach().cpu())
X_ts.append(img.detach().cpu())
xt_bar = x1_bar
if t != 0:
xt_bar = self.q_sample(x_start=xt_bar, x_end=x2_bar, t=step) # 对应公式中的D(x0, t)
xt_sub1_bar = x1_bar
if t - 1 != 0:
step2 = torch.full((batch_size,), t - 2, dtype=torch.long).cuda()
xt_sub1_bar = self.q_sample(x_start=xt_sub1_bar, x_end=x2_bar, t=step2) # 对应公式中的D(x0, t-1)
x = img - xt_bar + xt_sub1_bar # 最终得到的,对应公式中的x_(t-1)
img = x
t = t - 1
return X1_0s, X_ts
有一个小问题:
-
此处\(x_T\)的分布是由另一个数据集的情况给定的,如果采用blur、inpaint之类的方式退化图像,怎么知道\(x_T\) 的分布?
- 在sampling时,从数据集中去一个\(x_0\),计算出\(x_T\),将其作为反向生成图像的起点。
作者在文中提到了GMM,我没太看明白
- 在sampling时,从数据集中去一个\(x_0\),计算出\(x_T\),将其作为反向生成图像的起点。
-
但这样做有一个问题:反向生成出的图像有很高的质量,但是多样性很低,如何处理?
- 给\(x_T\) 加一个值很小的高斯噪声
个人的一些理解
与加噪的那些模型相比
- 加噪的模型能够保证最终的模型是一个高斯分布,因此加噪时可以随机,反正最后的结果是高斯分布。给定一个\(x_0\),跑100次最后可以得到100个不同的\(x_T\)。
- cold diffusion:需要保证图像退化的最终分布的可预测性。如果图像退化过程是随机的话,那么无法保证最终的结果,因此加噪过程是一个可变性很小的过程。实际上,对于很多退化方式,\(x_0\)对应的\(x_T\)是固定的。
本模型与DDPM最大的不同,就是根本不关系加噪的方式,将目光放到了不同t时的数据本身上。
这个模型不关心图片退化的方式。对于代码,如果需要修改图片退化方式,只需要改q_sample()(图片退化函数)这一个函数就好,其它的几乎不用改。
这篇论文的精华就是它提出的algorithm2和恢复算子R的概念,两者合在一起组成的模型可以用于任意噪声。其对于相对线性的的变化,在反向拟合过程有着很好的效果。
标签:diffusion,loss,bar,self,start,理解,退化,图像,cold 来源: https://www.cnblogs.com/tantor/p/16688813.html