《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识
作者:互联网
《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识
视频讲解- 【第1季】1.第1章_ROS入门必备知识-视频讲解
- 【第1季】1.1.第1章_ROS入门必备知识-ROS简介-视频讲解
- 【第1季】1.2.第1章_ROS入门必备知识-ROS开发环境搭建-视频讲解
- 【第1季】1.3.第1章_ROS入门必备知识-ROS系统架构-视频讲解
- 【第1季】1.4.第1章_ROS入门必备知识-ROS调试工具-视频讲解
- 【第1季】1.5.第1章_ROS入门必备知识-ROS节点通信-视频讲解
- 【第1季】1.6.第1章_ROS入门必备知识-ROS其他重要概念-视频讲解
- 【第1季】1.7.第1章_ROS入门必备知识-ROS2.0展望-视频讲解
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课

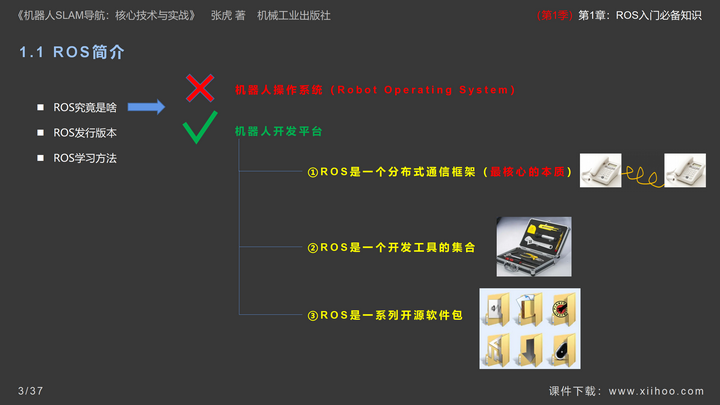
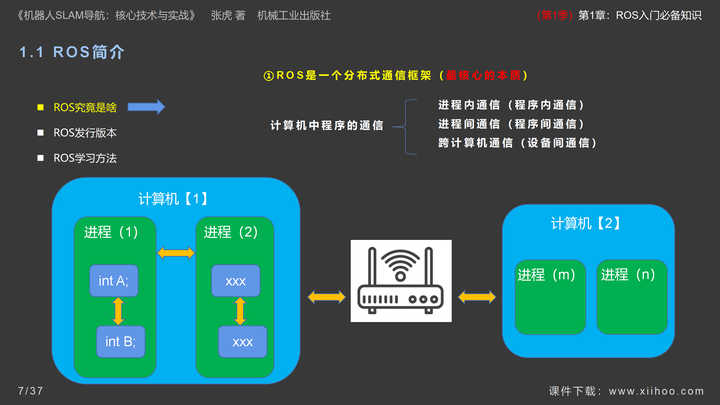
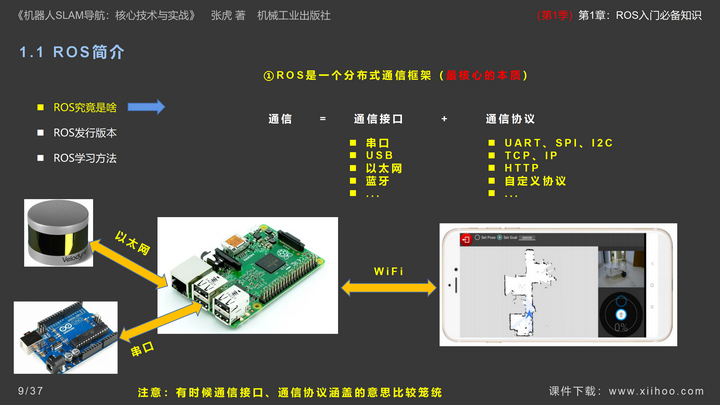
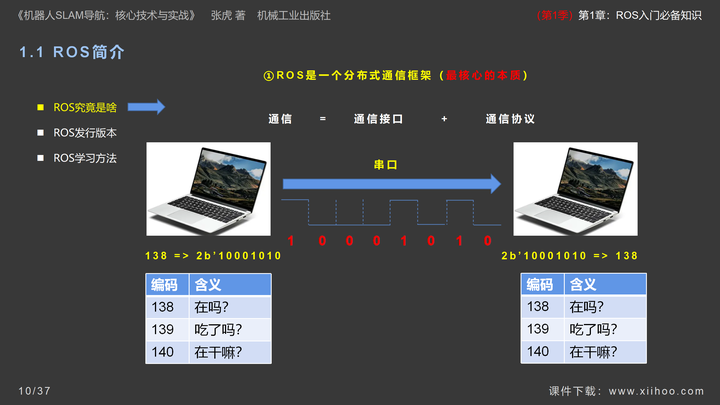
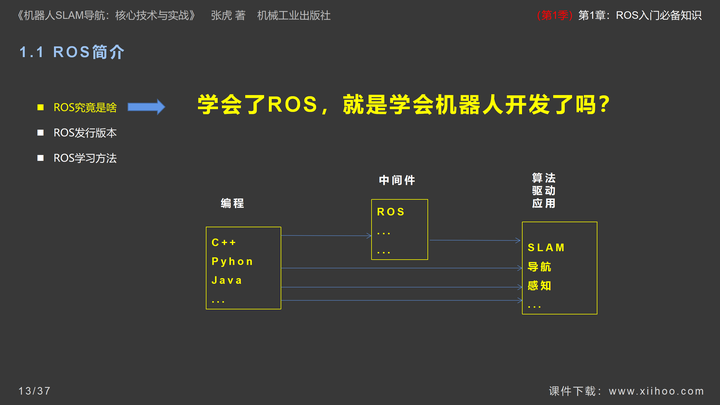
1.1 ROS简介
1.1 ROS简介
- ROS究竟是啥
- ROS发行版本
- ROS学习方法








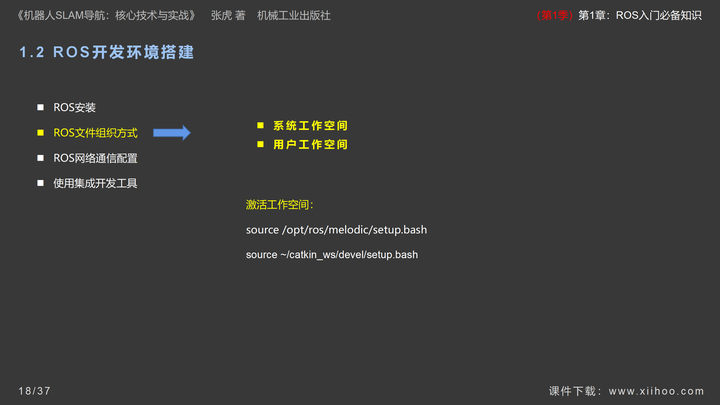
1.2 ROS开发环境搭建
1.2 ROS开发环境搭建
- ROS安装
- ROS文件组织方式
- ROS网络通信配置
- 使用集成开发工具


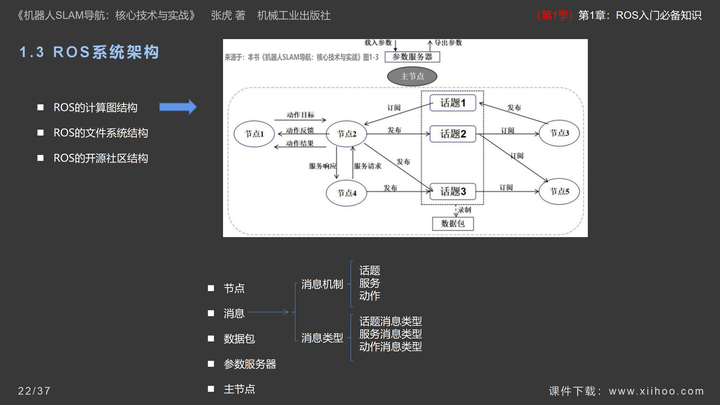
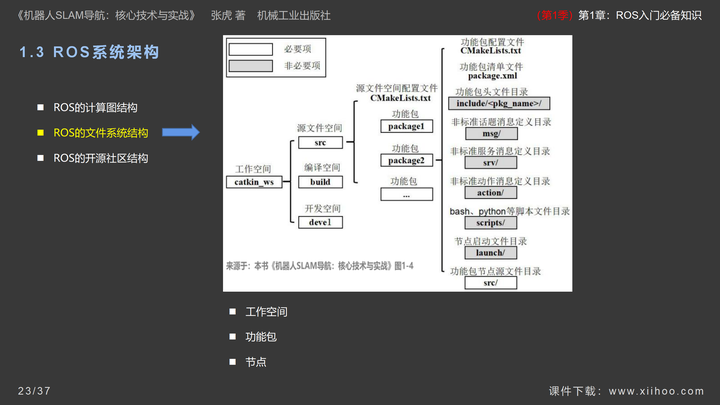
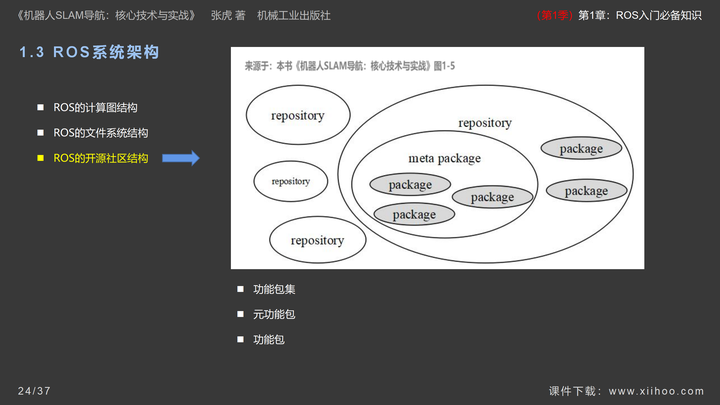
1.3 ROS系统架构
1.3 ROS系统架构
- ROS的计算图结构
- ROS的文件系统结构
- ROS的开源社区结构
1.4 ROS调试工具
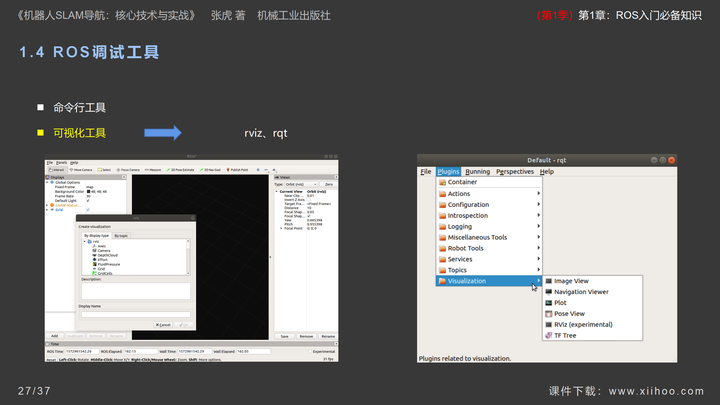
1.4 ROS调试工具
- 命令行工具
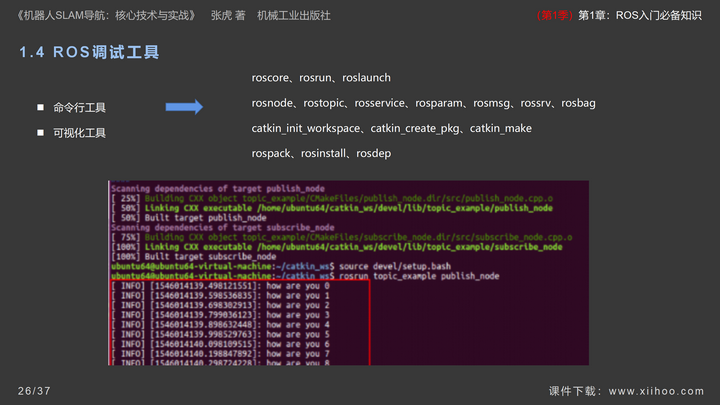
- 可视化工具
1.5 ROS节点通信
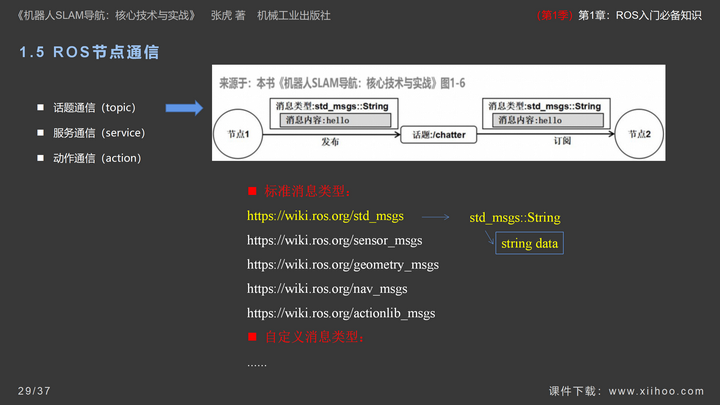
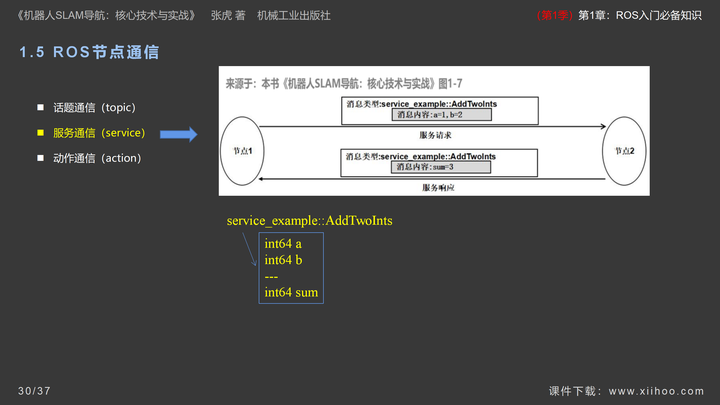
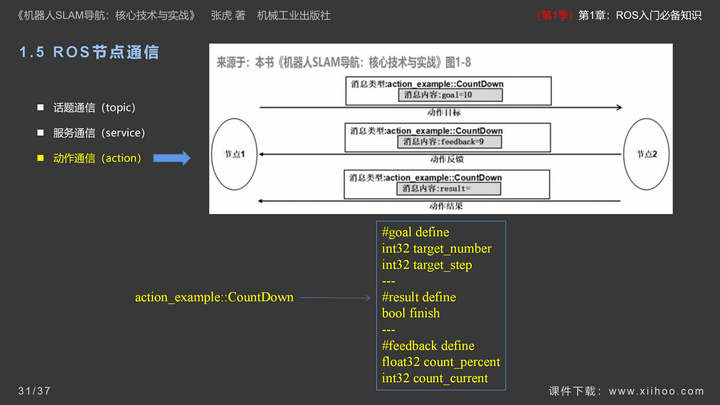
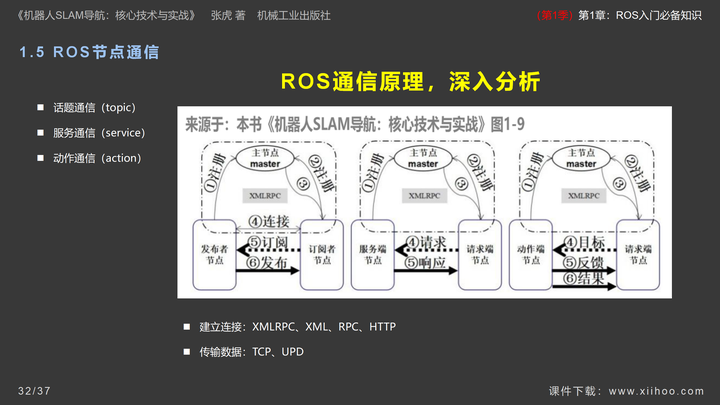
1.5 ROS节点通信
- 话题通信(topic)
- 服务通信(service)
- 动作通信(action)
1.6 ROS其他重要概念
1.6 ROS其他重要概念
- parameter
- tf
- urdf
- launch
- plugin
- nodelet
1.7 ROS2.0展望
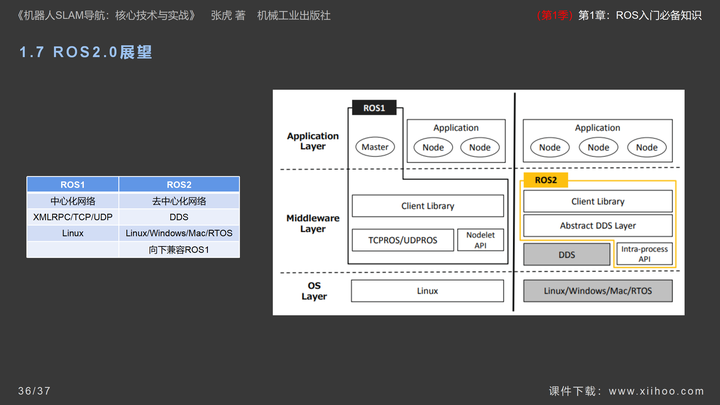
1.7 ROS2.0展望
 例程源码下载
例程源码下载
- Github下载: github.com/xiihoo/Books_Robot_SLAM_Navigation
- Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
- PPT课件下载:
- PDF课件下载:
标签:入门,E5%,必备,E7%,SLAM,讲解,ROS 来源: https://www.cnblogs.com/hiram-zhang/p/16502737.html