pix无人机使用(0)控制模式
作者:互联网
https://docs.px4.io/v1.11/zh/flight_modes/position_mc.html


")
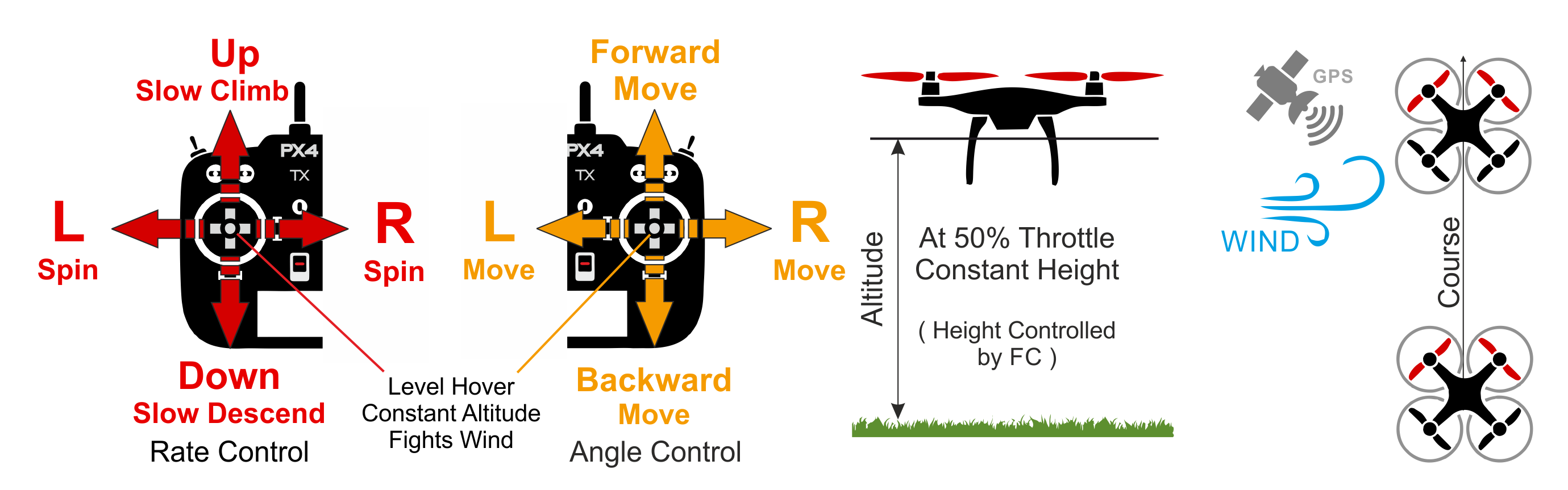
位置模式是一种易于驾驶的遥控模式,其中滚动和俯仰操纵杆在左右和前后方向(相对于飞机的“前部”)控制地面速度,并且油门控制上升-下降的速度。 当杆被释放/居中时,飞机将主动制动、改平并锁定到3D空间中的位置——补偿风和其他力。
位置模式是对于新手而言最安全的手动模式。 与高度和手动/稳定模式不同,当摇杆居中时飞机将停止运动,而不是持续运动直至被风阻减慢为止。
下图显示了模式行为(对于模式2发射器)。
在此模式下降落时必须小心。 首次在此模式下着陆时, 准备切换到 手动/稳定模式, 以便能够锁定飞机。 如果正确地检测到着陆, 电机会在触地后停止旋转, 然后在不久后锁定。 如果电机继续在较高的转速旋转或开始加速旋转, 首先切换到手动/稳定(多旋翼), 然后锁定。 请注意,由于GPS漂移,飞机可能会翻倒在地面上。

标签:居中,飞机,手动,模式,旋转,pix,无人机,锁定 来源: https://www.cnblogs.com/gooutlook/p/16462142.html