洛谷 P2060 题解
作者:互联网
首先,让我们先试一下这个极端数据:
10000000 10000000 1 1
假设正方向分别向左、向上,发现这匹马一直会往右下走。
多试几次,我们可以发现马在数据较大时一开始总是朝着一个方向走。
好,所以我们可以从这里入手,看看走到什么时候不能继续这样贪心。
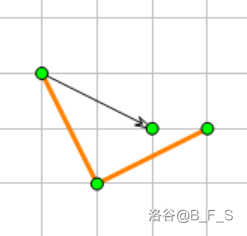
显然,这里走橙色的线比黑色的先要更优。
再多举几个例子试试,发现最保险的范围是 \(4\times4\)。
即:当此时马和终点的距离横纵坐标都小于 \(4\) 时不能继续贪心。
综上,总体思路是:大范围贪心,小范围打表。
具体这张表怎么打可以看看程序中的 extra 表格。(这里只画了四象限表格,因为我有了特殊的优化处理。)
下面来说一说这是什么处理吧:
对于目标在任何一个象限,我们都能通过将其翻折、对称等手段,全部改成由第二象限指向第四象限。此时,即使为了保险,我们也只需要往外扩展 5x5 的格子。
CODE
#include<bits/stdc++.h>
using namespace std;
int extra[5][5]={ 0,3,2,3,2,
3,2,1,2,3,
2,1,4,3,2,
3,2,3,2,3,
2,3,2,3,4};
int sx,sy,tx,ty;
int cnt=0;
int main()
{
scanf("%d%d%d%d",&sx,&sy,&tx,&ty);
int xx=abs(sx-tx),yy=abs(sy-ty);
while(xx>4||yy>4)
{
xx=abs(xx);
yy=abs(yy);
if(xx<yy) xx--,yy-=2;
else xx-=2,yy--;
cnt++;
}
printf("%d",cnt+extra[xx][yy]);
return 0;
}
标签:洛谷,tx,int,题解,yy,象限,xx,abs,P2060 来源: https://www.cnblogs.com/Na2SO4/p/solution-P2060.html