路径规划—PRM(Probabilistic Road Map)
作者:互联网
一、原理:
Probabilistic Road Map, 分为两个过程
Learning phase和Query phase.
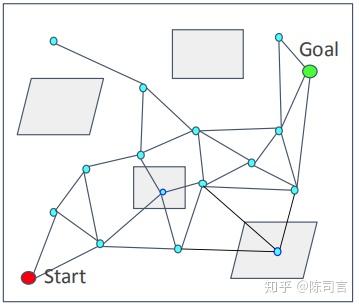
Learning phase:
1. Sample N points in C-space.(在空间内撒N个点)
2. Delete points that are not collision-free.
3. Connect to nearest points and get collision-free segments.
4. Delete segments that are not collision free.


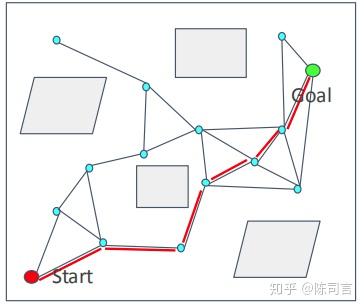
Query phase:
- Search on the road map to find a path from the start to the goal(using Dijkstra's algorithm or the A* algorithm).
- Road map is now similar with the grid map(or a simplified grid map).
二、优缺点:
优势:
概率完备;不用在整个环境搜索,简化了环境,相对于A*更加高效
劣势:
Required to solve 2 point boundary value problem.
Build graph over state space but no particular focus on generating a path.
Not efficient.
改进方法:Lazy collision-checking
一、基本思想:
Collision-checking process is time-consuming, especially in complex or high-dimensional environments. So sample points and generates segments without considering the collision.
二、流程:
- Find a path on the road map generated without collision-checking.
2. Delete the corresponding edges and nodes if the path is not collision free.
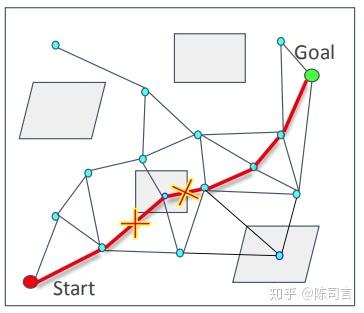
3. Restart path finding.

标签:Map,map,PRM,free,collision,points,phase,path,Probabilistic 来源: https://www.cnblogs.com/zhjblogs/p/15063108.html