摄像头的原理、组成、选型及应用
作者:互联网
目录
一、摄像头成像的光学原理
二、摄像头模组构成以及功能原理
三、摄像头名词释义
四、摄像头参数解析
五、摄像头选型
一、摄像头成像的光学原理
1.1 光学的基本定律
(1)光线直线传播定律:在统一均匀介质中,光沿直线传播
(2)光线的独立传播定律:几何光学中,不同光源发出的光在空间某点相遇时,彼此互不影响,各自独立传播
(3)光线的传播路线可逆
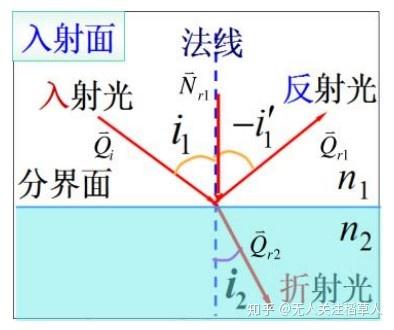
(4)光线的反射定律
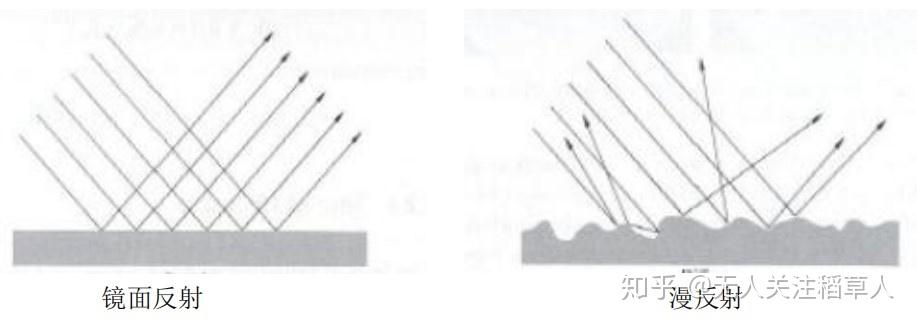
特点:
1.反射与入射光线均在入射面内
2.入射光线与反射光线分居法线两侧
3.入射角=反射角
漫反射在整机上的应用如AG玻璃
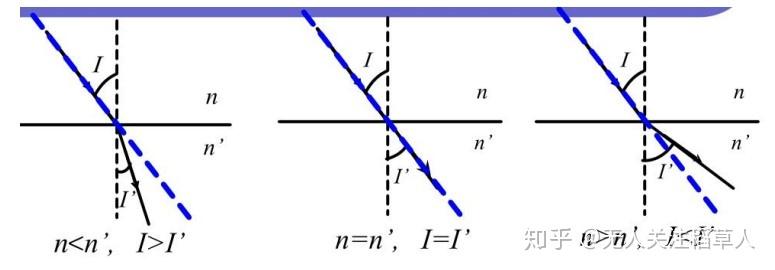
(5)光线的折射定律
光从一种介质射向另一种介质的平滑界面时,一部分光被界面反射,另一部分光透过界面在另一种介质中折射,折射光线服从折射定律:折射光线与入射光线、法线处在同一平面内,折射光线与入射光线分别位于法线的两侧
折射率大,折射角小,反之亦然
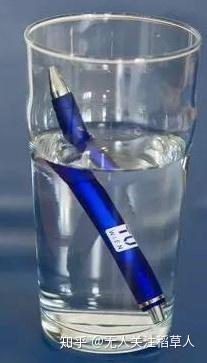
摄像头的成像,就是利用光的折射
1.2 摄像头成像原理
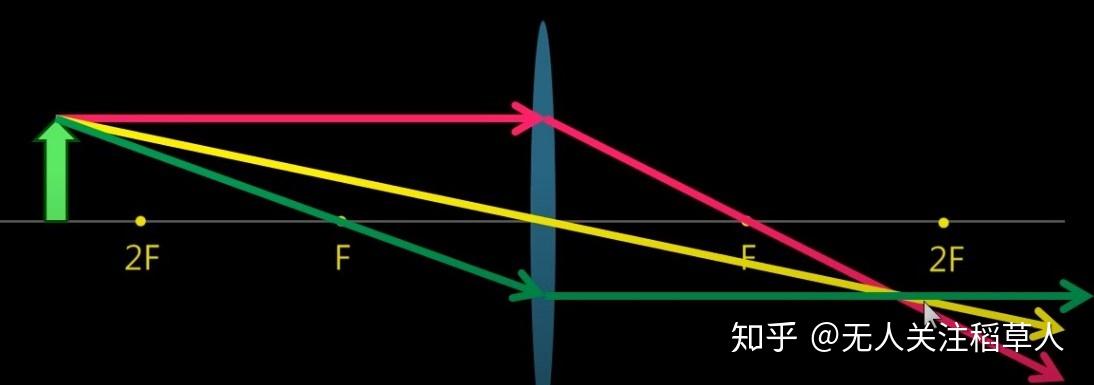
(1)凸透镜成像
凸透镜的成像特点:
1、平行主轴的光线经过透镜后会经过焦点
2、通过透镜中心的管线不发生偏折
3、经过前焦点的光线会平行与透镜后的主轴
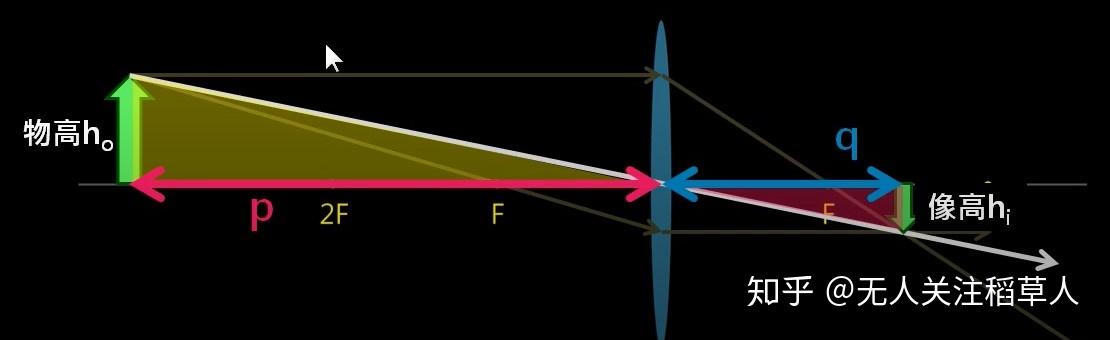
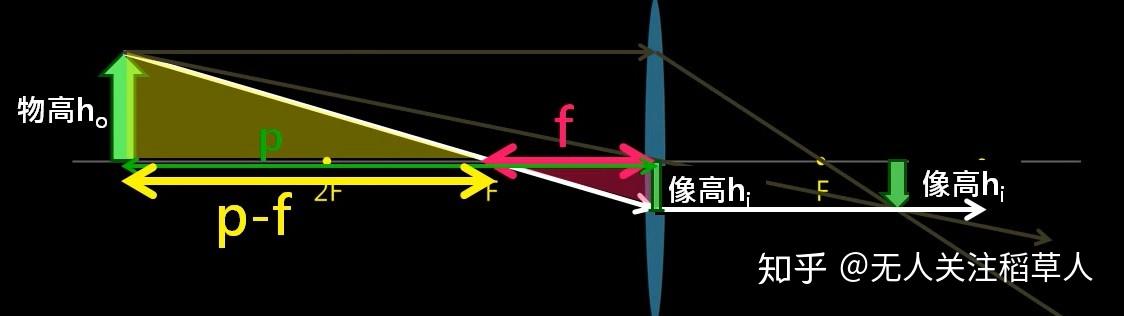
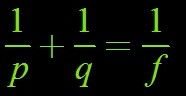
成像公式证明:
物距:p
相距:q
焦距:f
根据这个公式:
如果焦距是正,那么是凸透镜,如果是负值,那么就是凹透镜
已知物距和焦距,如果算出来的像距是正数,那么就是实像,如果是负数,那么就是虚像
像高除以物高就可以知道放大率多大~
二、摄像头模组构成以及功能原理
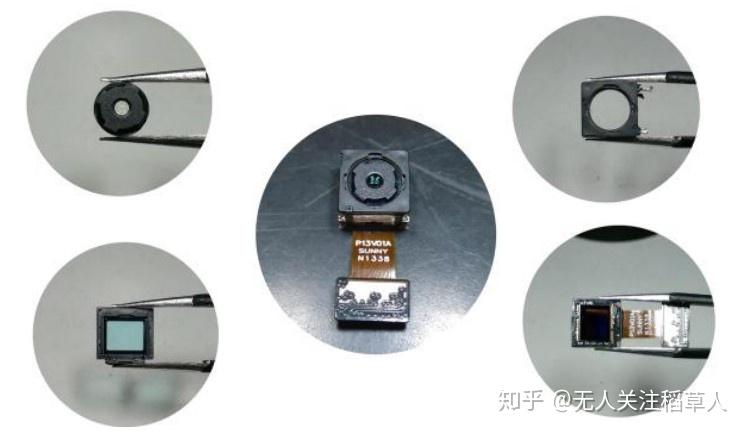
2.1 摄像头模组总体构成
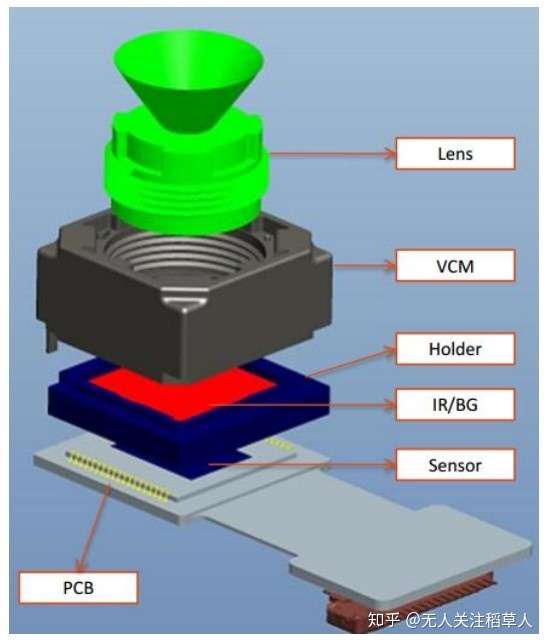
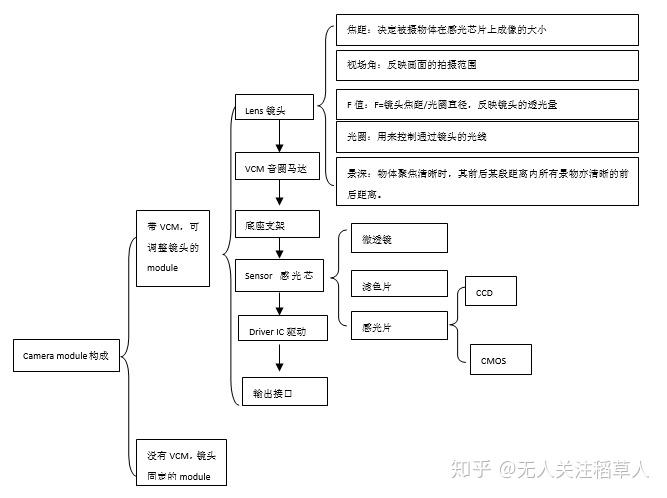
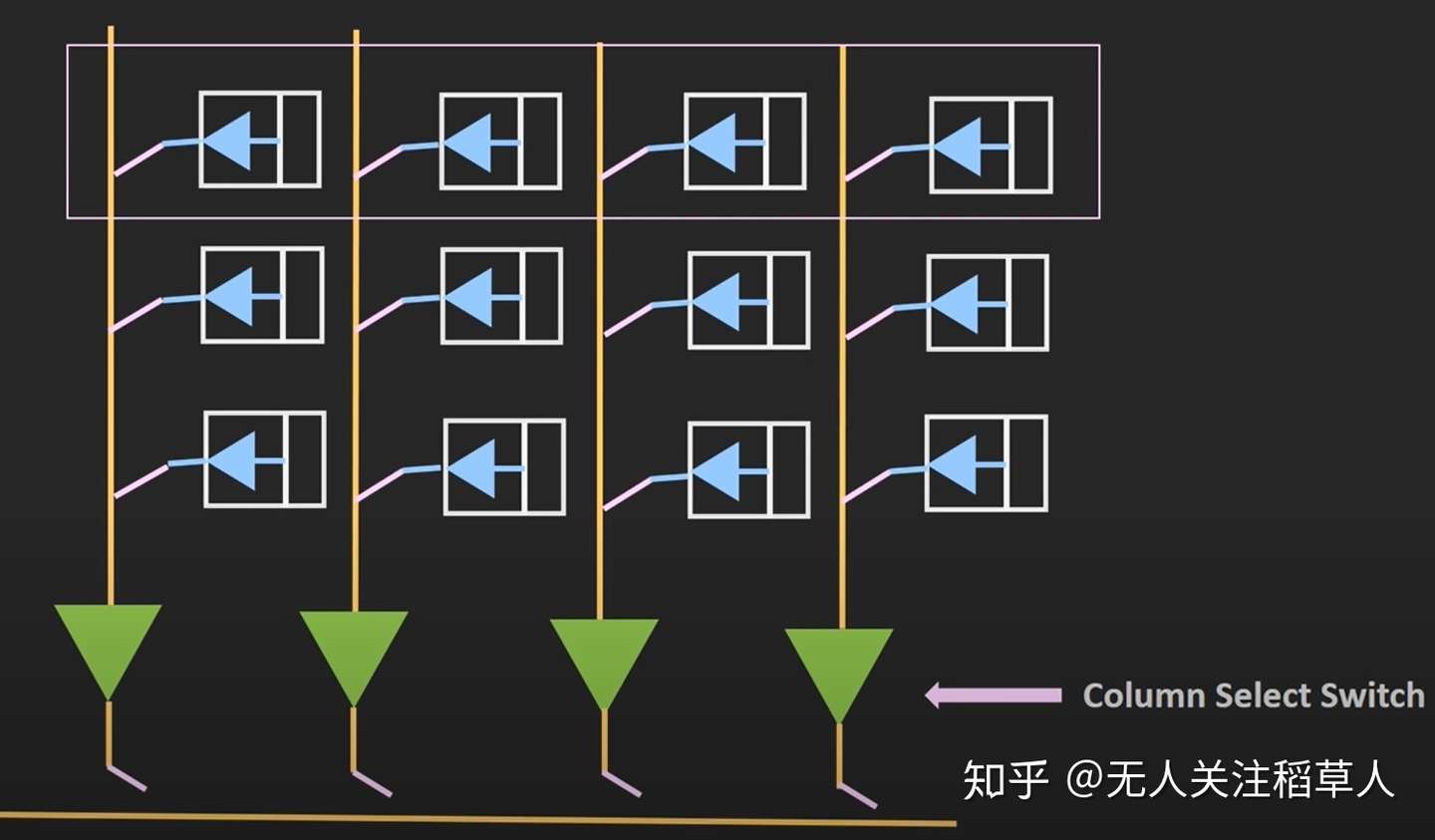
(1)摄像头Sensor
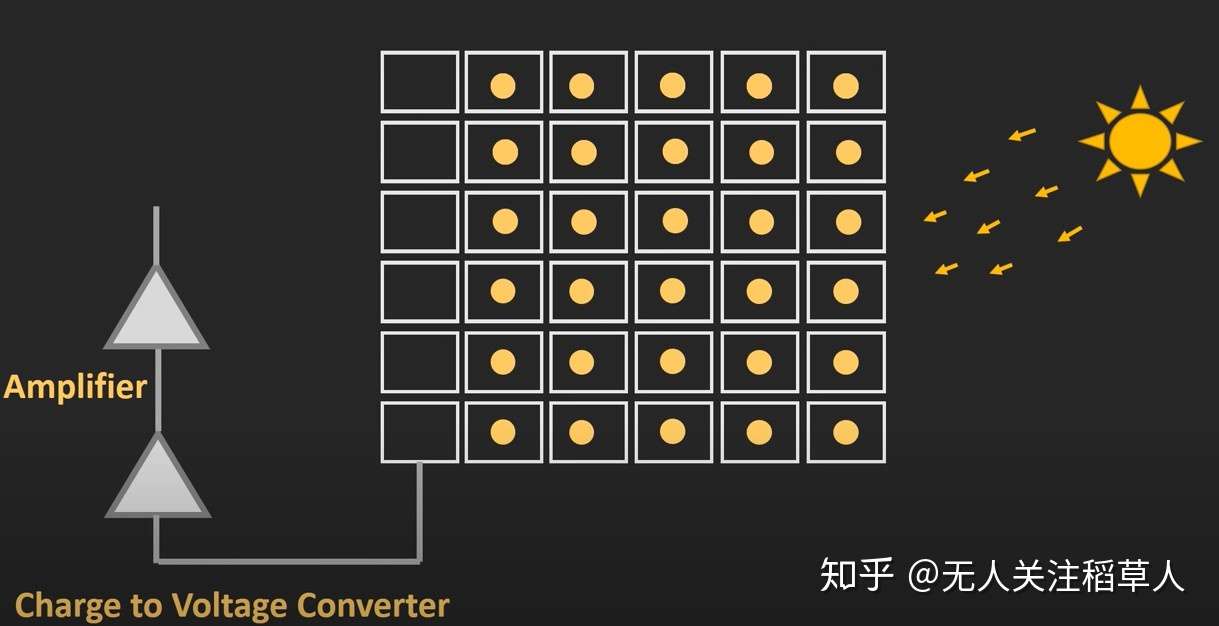
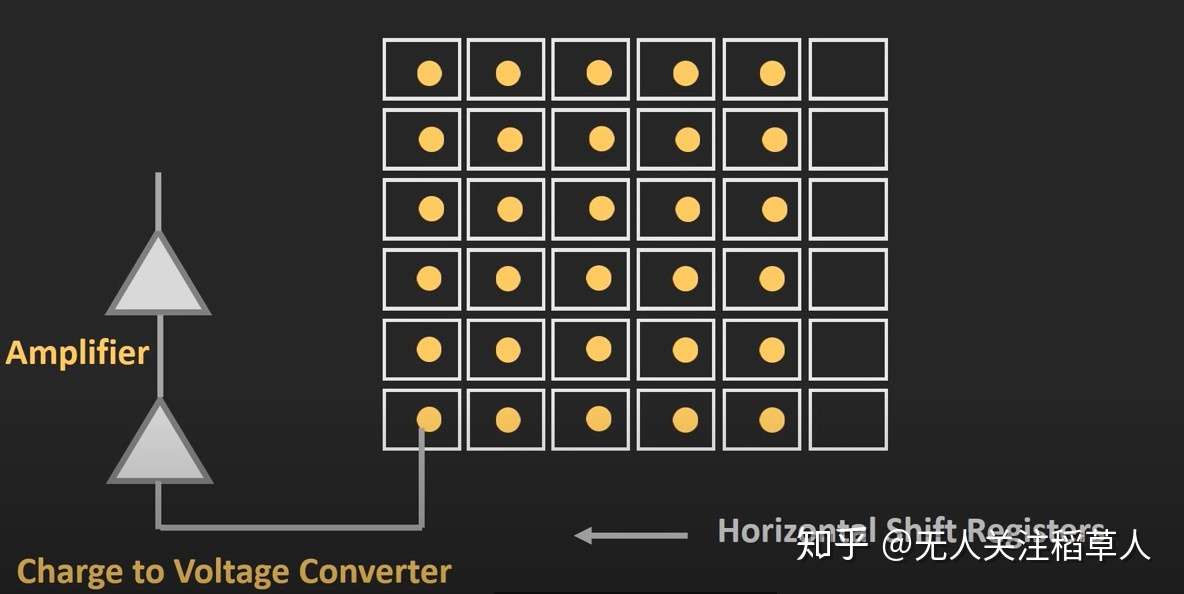
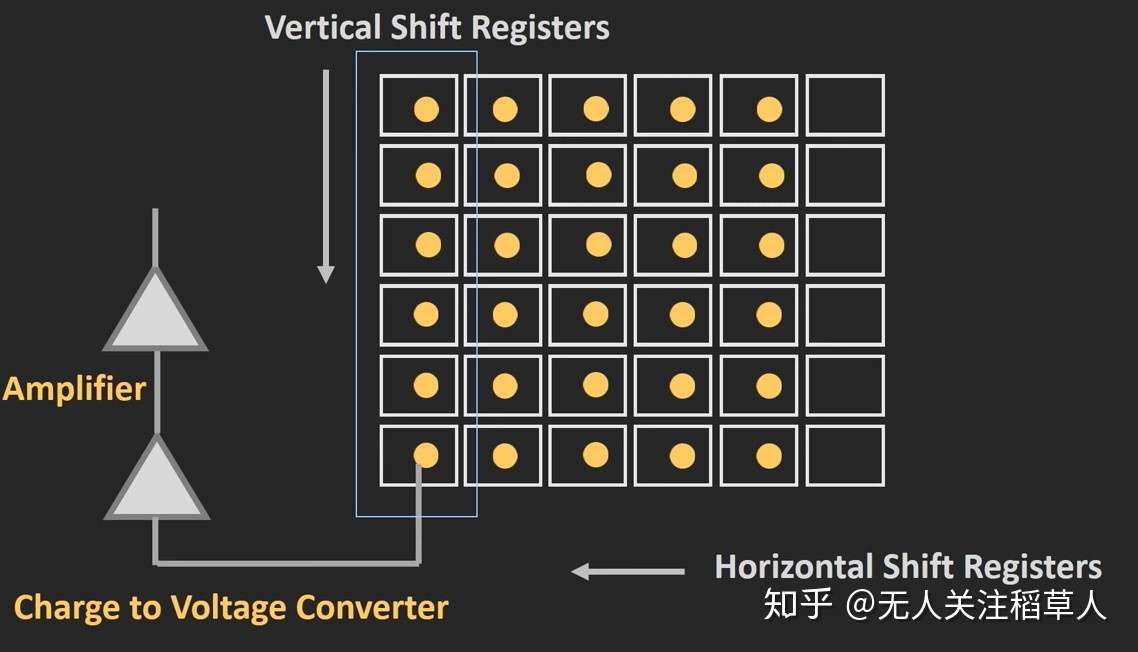
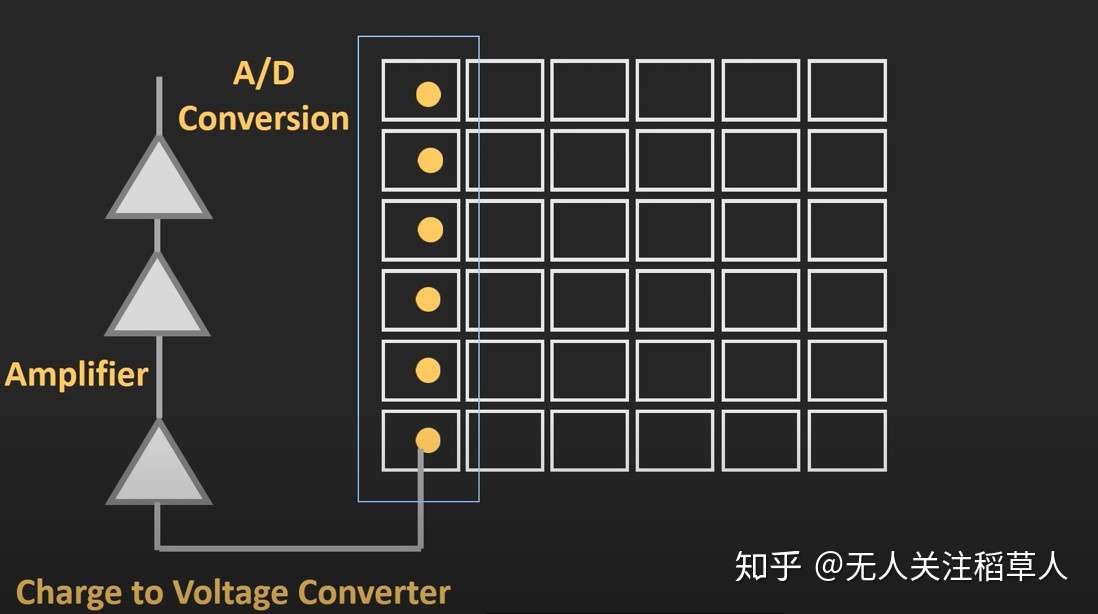
CCD
CMOS
它是怎么感应出不同颜色的?---滤光片、光电转换、计算电荷量
像素上已经有滤光片了,为什么还需要IR滤光片?

体积原因:
CCD工艺落后,没有集成内置的ADC和Timer,需要外置,所以体积大
功耗原因:
工艺、供电模块CCD更多
处理速度:转化原因
图像效果:


通过全局快门来解决
高动态、低噪声 CCD
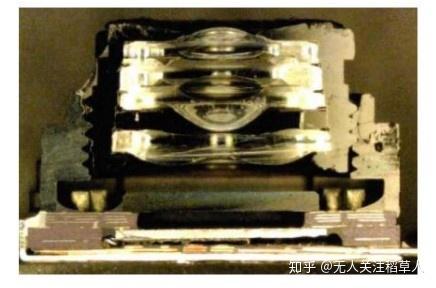
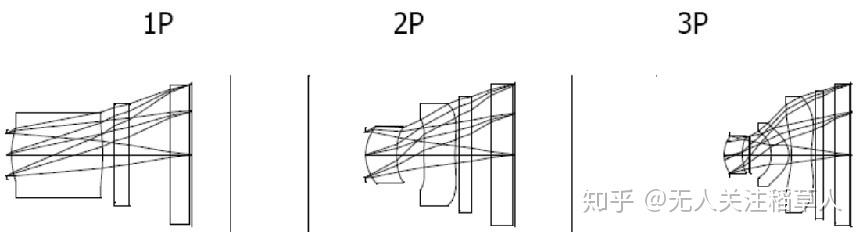
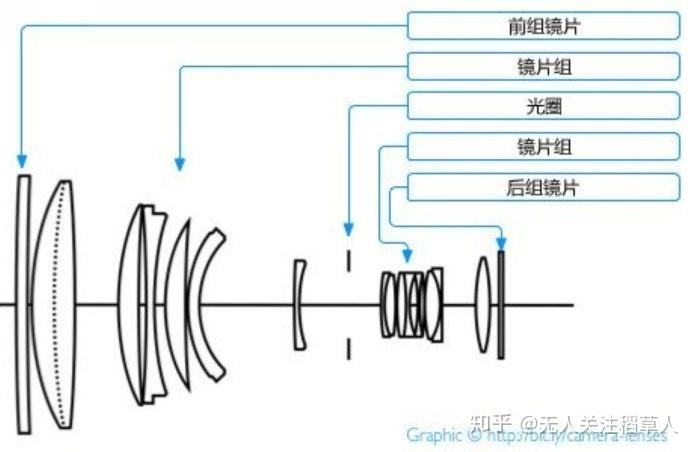
(2)镜头
镜头组成是透镜结构,一般可分为塑胶透镜(Plastic)或玻璃透镜(Glass)
通常摄像头用的镜头构造有:1P、2P、1G1P、1G2P、2G2P、2G3P、4G、5G等
2P 3P G+P
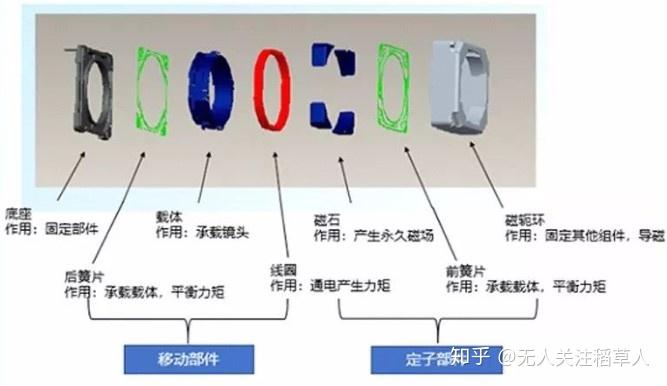
(3)马达
目前手机的马达主要分为三种:步进马达(Stepper Motor)、超声波马达(Ultrasonic motor,压电马达 Piezo Motor 的一种)、音圈马达(VCM,Voice Circle Motor/Voice Coil Actuator)。音圈马达以其结构简单、体积小等特点成为现阶段的主流。
因为原理和扬声器类似,所以叫音圈电机,具有高频响、高精度的特点。其主要原理是在一个永久磁场内,通过改变马达内线圈的直流电流大小,来控制弹簧片的拉伸位置,从而带动上下运动。
(4)滤光片
为什么需要滤光片?
IR自然界存在着各种波长的光线,人眼识别光线的波长范围在320nm-760nm之间, 超过320nm-760nm的光线人眼就无法见到;而摄像机的成像元器件CCD或CMOS可以看到绝大部分波长的光线。由于各种光线的参与,摄像机所还原出的颜色与肉眼所见在色彩上存在偏差。如绿色植物变得灰白,红色图画变成浅红色,黑色变成紫色等。
三、摄像头名词参数释义
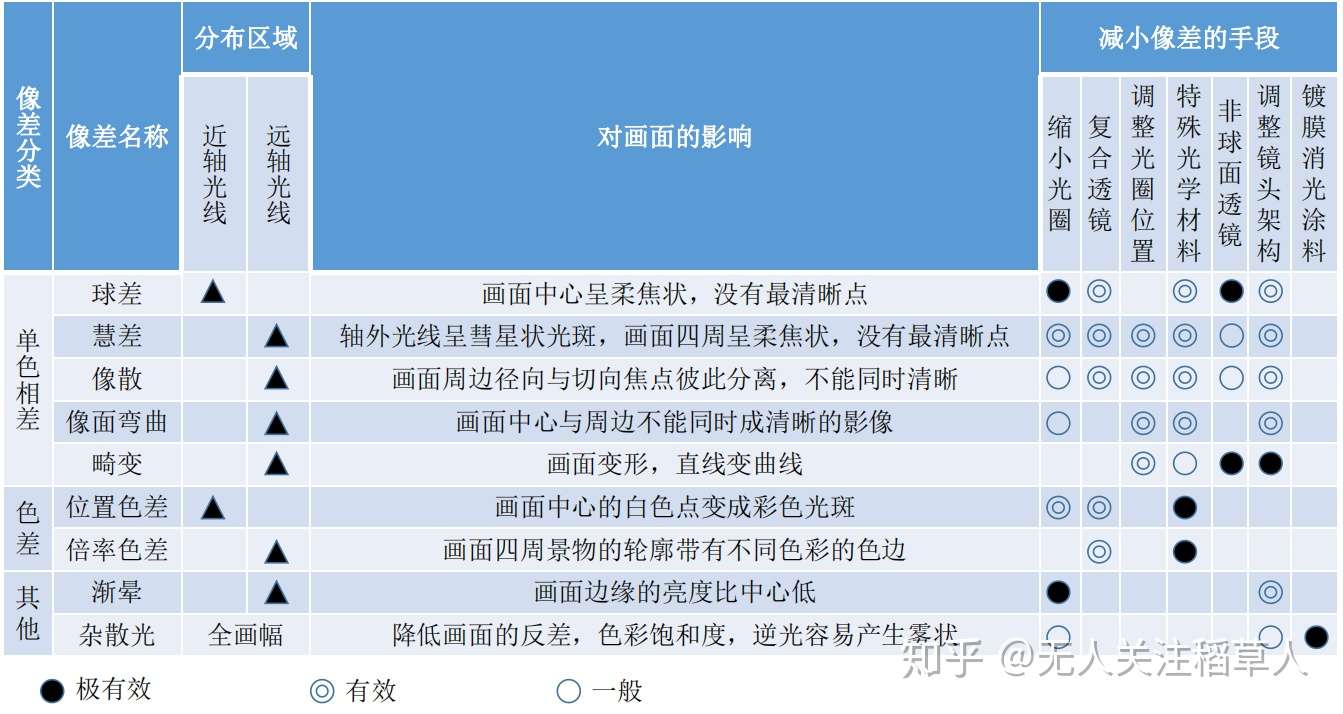
(1)像差
镜头形成的实际影像与理想影像之间的差异叫做像差,常见的像差分为单色像差和色差
单色像差:指单一颜色的光通过镜头后形成的像差,主要有球差、慧差、像散、场曲(像面弯曲)、畸变
色差:指光的波长不同导致折射率产生差异的现象,其主要有位置色差(横轴色差)与倍率色差(垂轴色差)
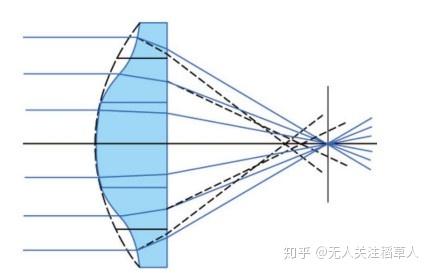
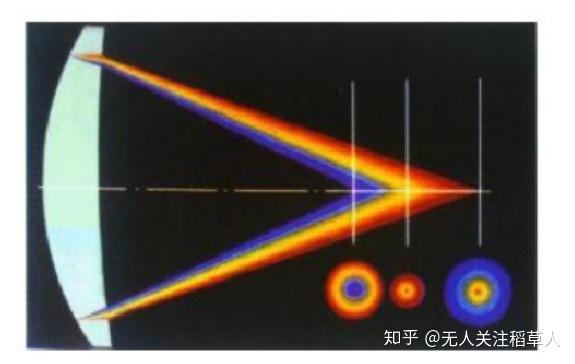
球差:指通过球面透镜的光线无法汇聚于一点的现象
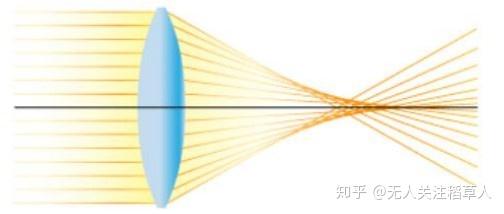
特点:球差是轴上像差,不是光学系统的制作不良引起的,是球面折射固有的特性造成,球面的直径越大,焦长变短,球差越严重
消除球差的方法:使用非球面镜片,如右图所示,手机镜头中都采用非球面镜片来消除球差
慧差:指的是州外光纤通过透镜无法汇聚于一点,经常形成彗星状的光斑
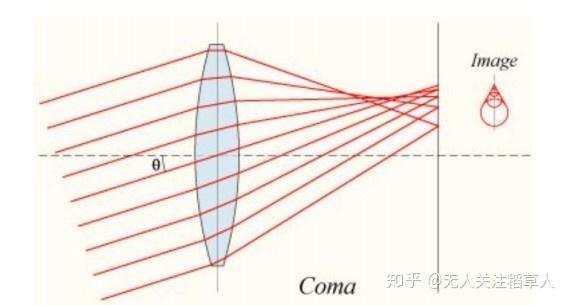
特点:慧差是轴外像差且是远轴光线产生,多产生于镜头的边缘视场
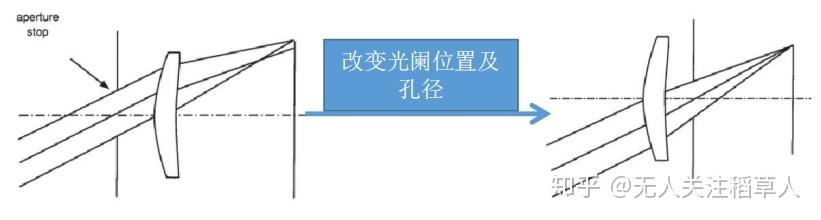
减小慧差的办法:缩小光圈,移动光圈的位置或者有选择的增加透镜
像散:像散是指轴外光线通过透镜后在不同的空间位置聚焦成俩条焦线,而像点在俩条焦线中间,呈现为一个比较模糊的光斑
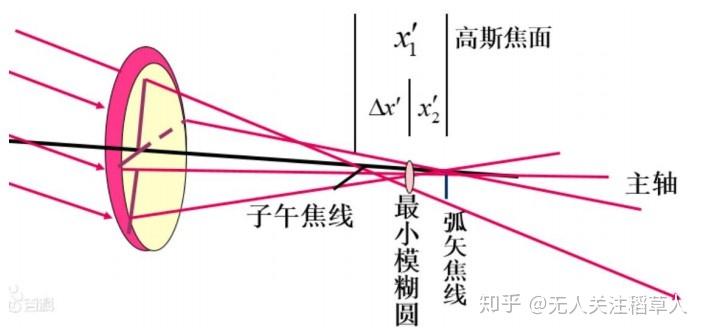
特点:像散是轴外像差,难以消除,且同光圈基本无关,所以像散是镜头光学设计中重点关注的单色像差;其可以通过选择透镜的位置及曲率来控制
像面弯曲:在垂直于光轴的平面上的物体的成像面,未必是与光轴垂直的平面,一般都成为弯曲的面。这个现象被称为像面弯曲
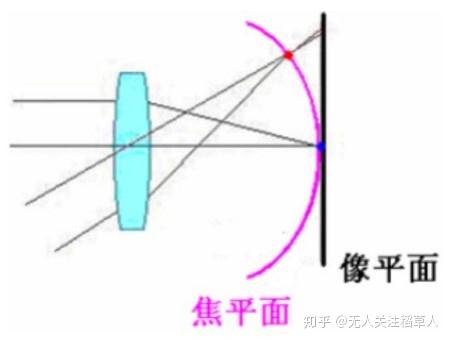
特点:像面弯曲是轴外像差,画面的中心与周边不能同时成清晰的像
减小像面弯曲的方法:调整光圈的位置,选用特殊的光学材料,优选镜头的架构
畸变:畸变是因为透镜成像时,视场的不同区域所形成的影像放大倍率不同而形成的一种变形,这种扭曲越靠近画面边缘越严重,畸变不影响清晰度,于光圈大小无关。
光圈位置与畸变关系:
畸变是轴外像差,经常是因为光学结构与光圈位置不对称引起,所以调整光圈位置可以改善畸变,非球面镜片也可以很好
改善畸变。
位置色差:指的是一束平行光(小角度近轴光线)通过镜头后汇聚于前后不同位置的像点上
特点:主要是轴上色差,是因为产生的原因是不同颜色的光的折射率不同导致,所以无法消除,光学设计上只能减小及控制,减小位置色差方式:缩小光圈,复合透镜及特殊光学材料
倍率色差:指的是轴外光点(远轴光线)发出的光通过镜头后汇聚于不同的高度上使图像的边缘分解出朦胧的彩虹
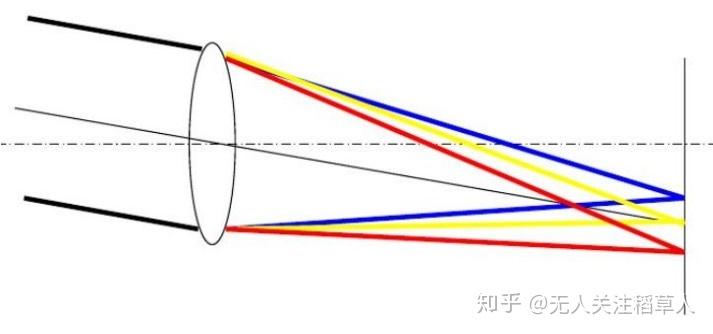
特点:轴外像差,减小倍率色差方式:使用复合透镜和使用特殊光学材料
四、摄像头参数解析
(1)Pixel Size
也就是像素的尺寸,如果一个系统中不存在绕射或者是其他的光学误差,分辨率将仅仅与像素大小和物体大小有关,简单来说,当像素尺寸减小时,分辨率增加,这种增加使得拍摄较小的物体时,即使物体之间的间距减小,由于像素更小,他们之间的缝隙也能被检测出来。
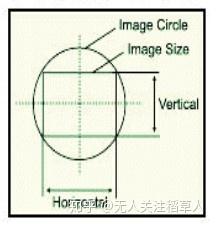
(2)Image Size
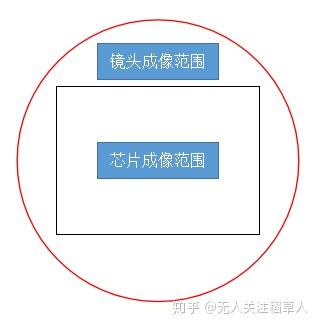
Lens MIC<sensor MIC
全画幅:36mmx24mm

APS-C画幅 24mmx16mm

(3)FOV
视场角计算公式:
视场角2θ=2arctan[(D/2)/f]
Sensor为IMX377其对角线为7.75,镜头焦距为4.5mm
DFOV=2arctan[(D/2)/f]=2*arctan[(7.75/2)/4.5]=81.5°
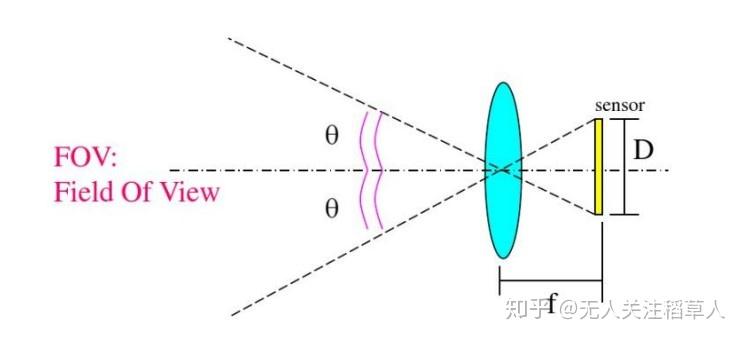
如上图所示,焦距越短,视场角越大,因此短焦镜头也可以称为是大广角镜头
(4)F Number
F.no=f/D
在焦距固定的状态下,孔径越大,F值则越小,进光量越多,画面越亮;反之则F值越大,进光量越小,画面越暗。
f/#与理论分辨率和对比度极限以及景深(DOF)和镜头焦深直接相关。此外,它还会影响特定镜头设计的像差。

(x)焦深
焦深为在理想像点前后都可以成清晰像的范围
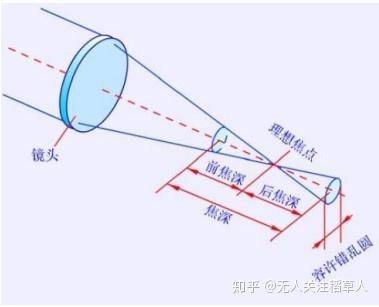
光圈与焦深的关系:
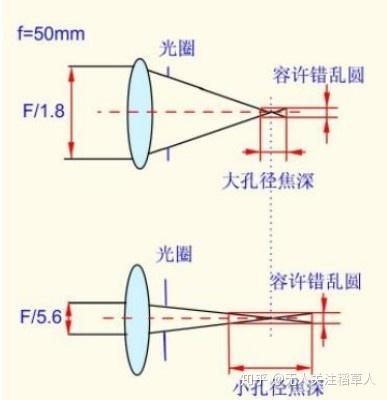
光圈越大,焦深越长
(5)Chief Ray Angle
主光线入射角:从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为一个参数,称为主光线入射角(CRA),最边缘的光线也就是最大角度
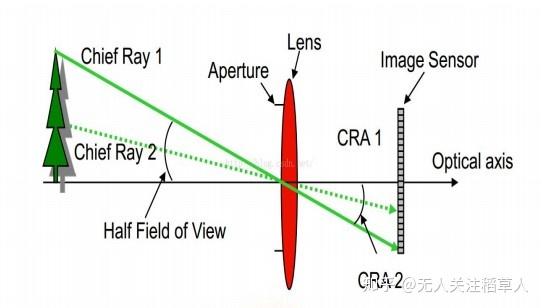
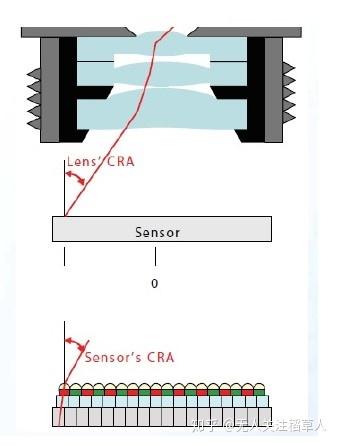
为了保证更多的光线进入到Sensor,摄像头的LENS CRA和Sensor的CRA要匹配,并且角度差异要控制在±3°以内,如果Pixel越小,那么要求就越高,如果不匹配,
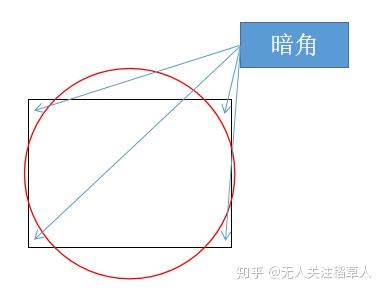
lens CRA小于sensor CRA,会出现四周偏暗的情况,此时光线达不到pixel的边缘
lens CRA大于sensor CRA,光线折射到临近的pixel,导致pixel之间出现串扰,出现图像的偏色
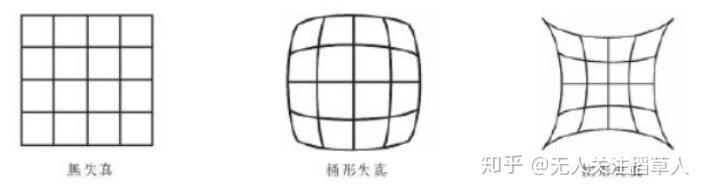
(6)Distortion-畸变
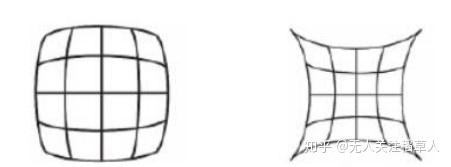
常见的畸变:桶型失真和枕型失真或者是梯形失真
几何失真,实际上信息是存在的,只是被放错了地方,如果我们能知道哪些信息是被放错的,被放错到哪里,那么就可以轻松的重新映射出来
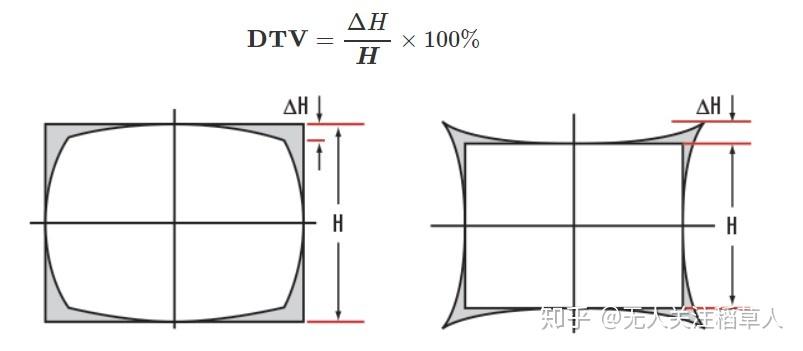
几何畸变与TV畸变:
几何畸变描述了畸变图像中点显示之处与它们在完美系统中所在处之间的距离。
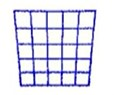
TV畸变的测量是由RIAA成像标准指定,并透过对填充垂直视场之方形目标进行成像来确定。
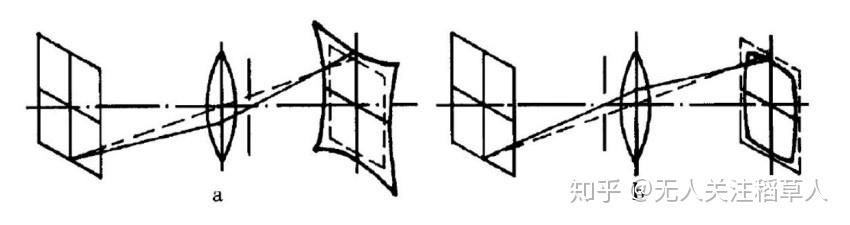
几何畸变的计算方式如下

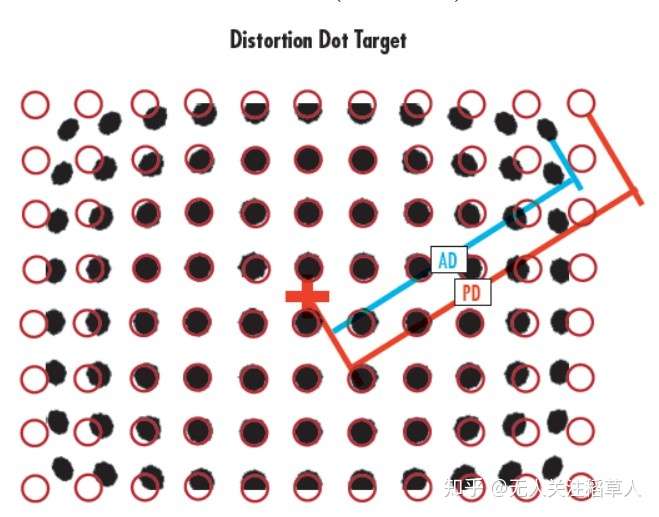
红点为目标图像,黑色是实际成像,需要校准
TV畸变的计算方式如下:
(7)MTF 光学调制传递函数 :分辨率
Modulation:
给定的分辨率下物体上黑色与白色的区分程度
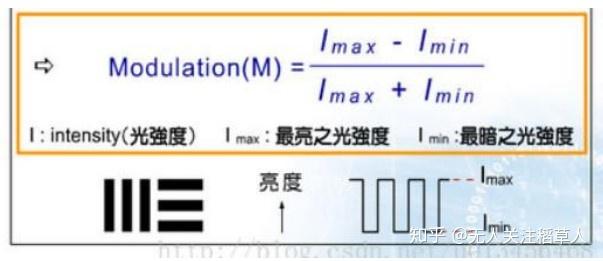
MTF:
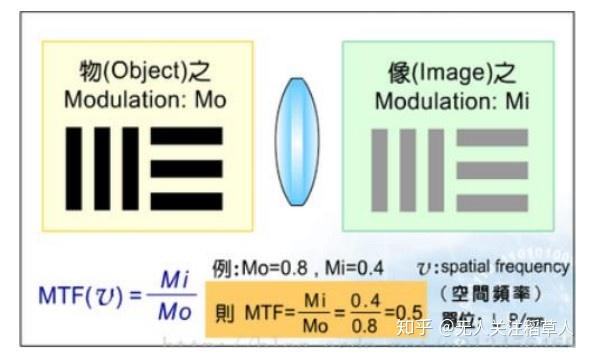
对于镜头而言,像差越大,镜头的光学品质越差,MTF值越低。
系统的空间分辨率取决于许多因素,包括绕射及其他光学误差所导致的模糊、圆点间距以及传感器检测对比度的能力
如果有两个一样分辨率的摄像头,但是拥有不同的对比度,获取到的图像有很大的不同。

像素较大的传感器具有较低的分辨率。像素较小的传感器具有较高的分辨率
标签:镜头,光线,畸变,选型,透镜,原理,色差,摄像头 来源: https://www.cnblogs.com/lijin-note/p/16662586.html