使用 Amazon EC2 降低 DeepRacer 的训练成本 DeepRacer-for-cloud 的实践操作
作者:互联网

AWS DeepRacer-for-Cloud的官方博客文档: 直达链接:https://aws.amazon.com/cn/blogs/china/use-amazon-ec2-to-further-reduce-the-cost-of-deepracer-training/
写在最前
由于博客中已经写了具体的方案,这里将里面的脚本提取出来,并对相应的问题做解决
这里采用 Deep Learning AMI (Ubuntu 18.04) Version 60.1
实例准备,我看到文章中有提到使用G和P系实例,如下:
g4dn.2xlarge:性价比较高的训练方式,基于GPU 加速,训练速度稍快于 DeepRacer console 训练
p3.2xlarge:训练速度远快于DeepRacer console 训练,快速迭代模型,取得训练成果
本次实践还是使用的 g4dn.2xlarge 那么我这里使用的是spot请求实例,而不是使用的On-Demand,会减少 70% 及以上的成本,不过也会出现一些问题,那么就是US-EAST-1区域的G和P系列的实例严重不足,可能运行一会就会停掉,那么我们可以先将基础环境部署好,直接制作镜像,那么在后面使用的时候可以快速拉起实例,不需要再对基础环境做过多的配置
需要注意的是,你需要查看你的EC2 limit,默认情况下是没有G和P系列的容量的,需要提交case提升limit,在提交limit的时候不要提交太多请求,很可能会给你驳回
为了方便,我这里制作了一个EC2的启动模板,也是为后续的训练打个基础,以免每次都需要手动配置
文章目录结构:
一、为EC2创建IAM角色1.首先进入IAM控制台2.选择EC2,点击下一步3.添加权限4.命名、查看和创建5.查看创建的角色
二、创建存储桶1.进入S3控制台2.创建存储桶3.查看创建的存储桶
三、创建启动模板1.首先需要选择镜像2.设置实例类型和密钥对3.定义子网和安全组4.配置存储5.高级详细信息6.查看摘要并创建模板
四、创建实例1.选择从模板启动实例2.查看spot请求
五、连接实例并构建基础环境Basic.连接你的实例
-
①.SecureCRT导入密钥
-
②.SecureCRT连接实例
接下来进入基础环境的搭建Step-1.拉取代码Step-2.安装DeepRacer本地训练所需的基础组件
-
错误场景一,解决方案
-
错误场景二,解决方案
Step-3.重新连接EC2实例,并执行第二阶段的环境初始化代码Step-4.加载训练DeepRacer所需脚本Step-5.编辑奖励函数,训练信息,车俩信息Step-6.编辑环境文件run.env
-
①.添加存储桶信息
-
②.编辑赛道信息
Step-7.更新python版本Step-8.更新配置Step-9.上传dr-upload-custom-files到S3存储桶Step-10.启动训练
六、后续操作(再训练)1.若实例终止,重新拉取实例,接着上一次训练
-
①.修改run.env文件
-
②.更新,使本次配置生效
-
③.若您修改了 custom_files 中的文件,那么请您再执行如下命令重新上传custom_files
-
④.开始训练
七、参数、命令释义八、遇到的问题1.NO PUBKEY2.Python3.6报错,更新python版本3.无法获得锁4.Sagemaker is not running以下为具体的操作方案
一、为EC2创建IAM角色
正如AWS官方博客中所说的,我们使用EC2去训练模型会用到如下3个服务
-
AmazonKinesisVideoStreams
-
CloudWatch
-
S3
那么这里进行演示创建新的EC2角色并赋权
1.首先进入IAM控制台
IAM创建新角色控制台:https://us-east-1.console.aws.amazon.com/iamv2/home#/roles/create?step=selectEntities
2.选择EC2,点击下一步

控制面板-1
3.添加权限
依次搜索S3,CloudWatch,AmazonKinesisVideoStreams,如下图 都需要 选择FullAccess结尾的,代表完全访问
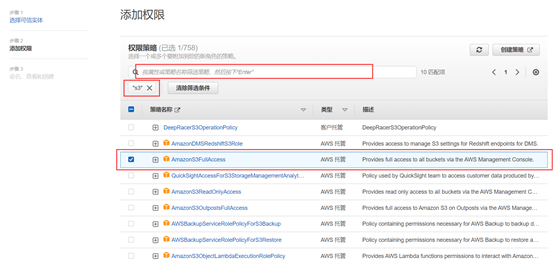
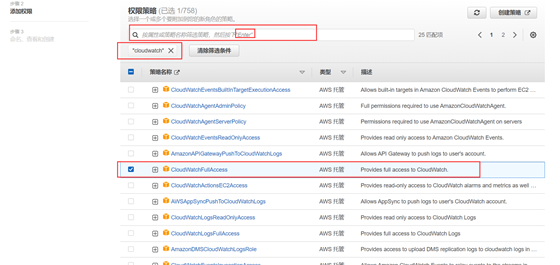

3个权限都添加完成后,点击下一步
4.命名、查看和创建
-
①.设置角色名称

SetRoleName
-
②.查看角色附加的权限
CheckRole_policy
-
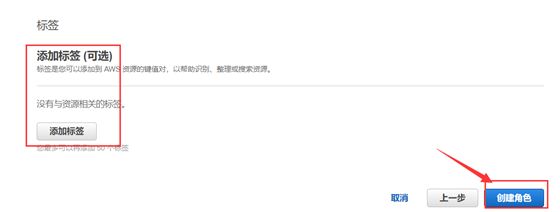
③.准备创建
根据自身需求是否添加标签(可选)
5.查看创建的角色
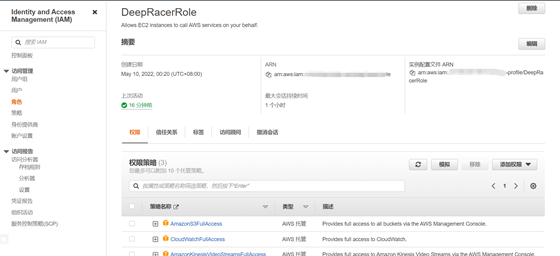
Check_Create_role
二、创建存储桶
1.进入S3控制台
S3存储桶控制面板:https://s3.console.aws.amazon.com/s3/
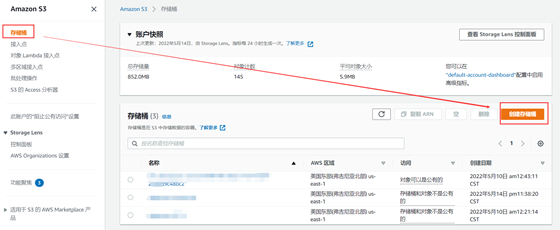
2.创建存储桶
此处只需要设置存储桶名称和区域,其他设置保持默认即可

滑到最下面点击 创建存储桶
3.查看创建的存储桶
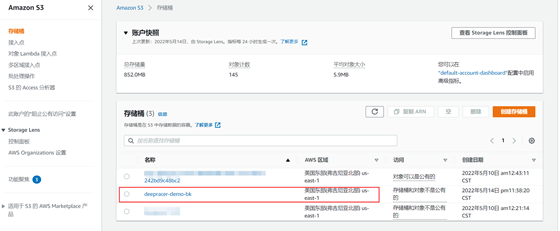
Check_bk
三、创建启动模板
EC2启动模板控制面板:https://us-east-1.console.aws.amazon.com/ec2/v2/home?region=us-east-1#LaunchTemplates
1.首先需要选择镜像
请选择 Deep Learning AMI(Ubuntu 18.04) 镜像

2.设置实例类型和密钥对
虽然官方给出的提示是不要在模板中包含这两个参数,但是本次实验是为了后面多次部署节省时间,就预先在模板中定义

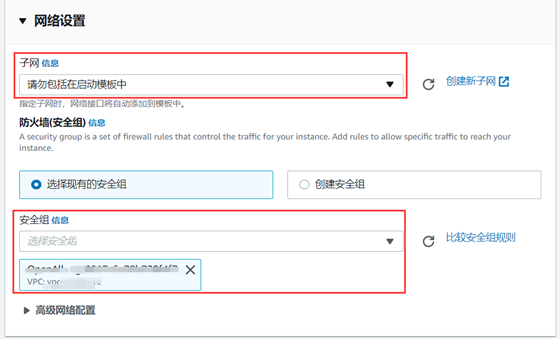
3.定义子网和安全组
由于本次我需要使用到spot请求,就不对子网进行设置,待会spot会在us-east-1任意一个区域进行请求
4.配置存储
官方博客给出配置说明为:根卷至少要高于150GiB的空间,这里设置为160GiB,我们还可以看到,AMI有一个存储卷,有225GB

5.高级详细信息
这里我勾选了 请求spot实例,为了降低成本,这里可以根据用户的自身情况是否勾选 然后在IAM角色这里,要选择我们预先为EC2创建的角色

6.查看摘要并创建模板

启动模板-查看已创建的模板
四、创建实例
EC2实例控制台:https://us-east-1.console.aws.amazon.com/ec2/v2/home?region=us-east-1#Instances
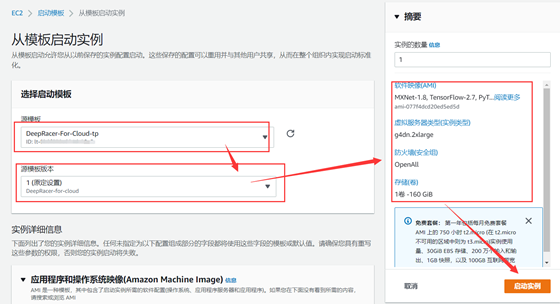
1.选择从模板启动实例
这里选择之前创建的模板

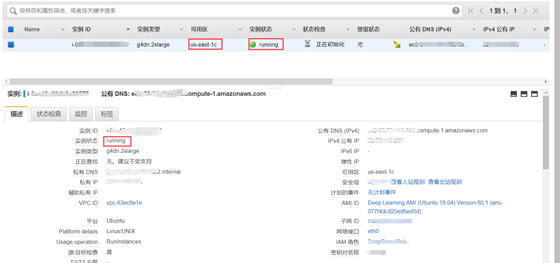
确认无误后,启动实例
查看创建成功的实例 如果您勾选了spot请求实例,并且在启动实例报错,提示没有spot额度,并且您在确保您账号有足够的limit,那么可能该区域的该时段没有可供您使用的spot实例,请使用按需实例进行创建
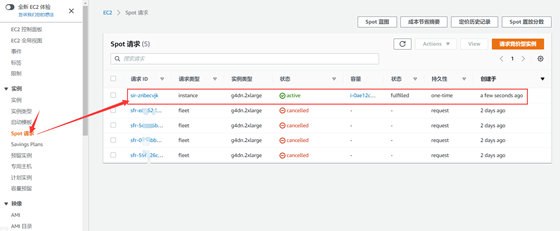
2.查看spot请求
如果您在实例模板中勾选了spot请求实例,并且成功启动,那么您可以在spot请求控制面板看到您的实例
五、连接实例并构建基础环境
这里还是采用AWS官方博客所给出的安装步骤
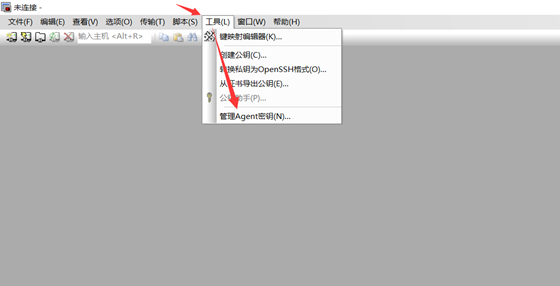
还是做一个很基础的展示,如何连接EC2,我这里采用的是SecureCRT连接工具
Basic.连接你的实例
这里只支持使用以.pem类型的密钥(与 OpenSSH 共用),若您是.ppk类型的,请使用putty进行连接
-
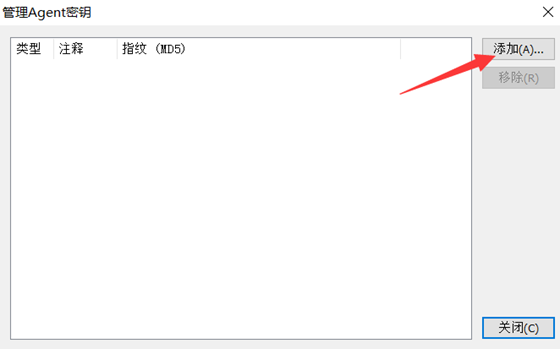
①.SecureCRT导入密钥
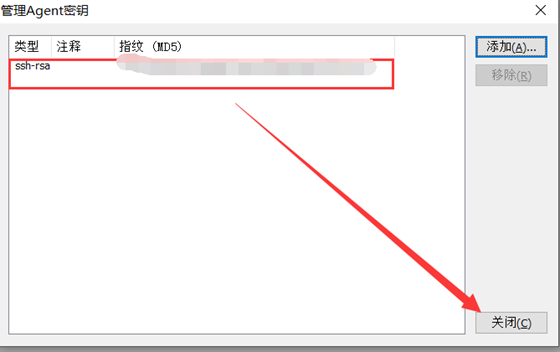
-
②.SecureCRT连接实例
请注意,因为我们使用的是Ubuntu的镜像,那么这里使用的用户名为 ubuntu
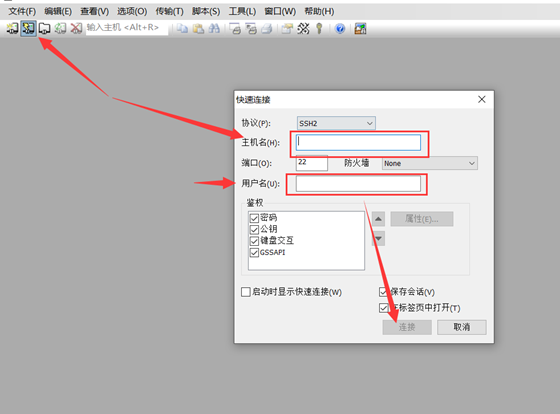
连接后,若弹出提示框,请点击 接受并保存
SecureCRT连接实例成功
接下来进入基础环境的搭建
AWS DeepRacer-for-Cloud安装训练脚本如下
-
Step-1.拉取代码
进入创建的EC2实例,并执行以下命令,从GitHub拉取代码:
git clone https://github.com/aws-deepracer-community/deepracer-for-cloud.git
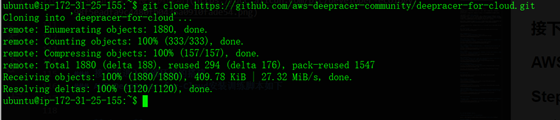
git code
-
Step-2.安装DeepRacer本地训练所需的基础组件
执行第一阶段的环境预配置代码,这会安装DeepRacer本地训练所需的基础组件,之后重启EC2实例: 这一步官方给出的只有2行代码,那么在实际的执行过程中,因为版本的变化,衍生出了一些新的问题
cd deepracer-for-cloud && ./bin/prepare.shsudo reboot
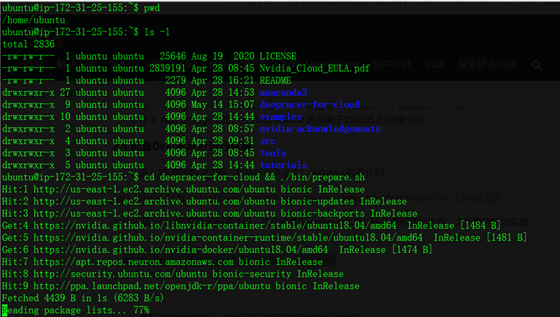
本地基础环境-1
因为这里考虑到会出错的场景,在这里进行额外操作 这里贴出实际报错场景一,提示 NO_PUBKEY
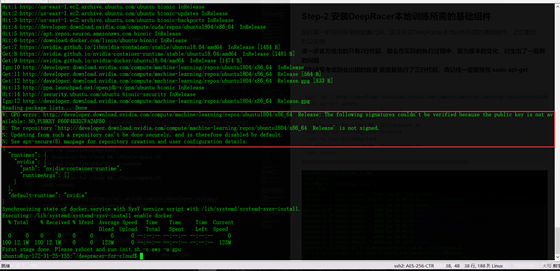
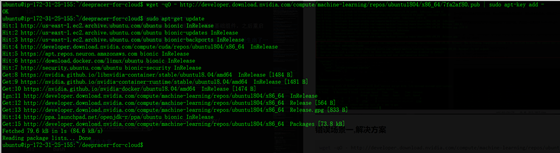
错误场景一,解决方案### 添加PUBKEYwget -qO - http://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64/7fa2af80.pub | sudo apt-key add -### 更新sudo apt-get update
### 重新执行,请确保您不在 deepracer-for-cloud目录中,请回到ubuntu的home目录下cd deepracer-for-cloud && ./bin/prepare.sh### 重启sudo reboot
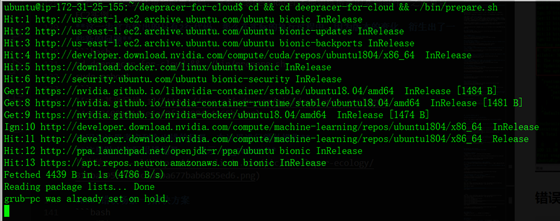
若出现如下进度条,则表示错误已修复,正在安装基础环境

错误场景二,解决方案
若没有出现进度条,并出现如下错误,可能会出现多次
E: Could not get lock /var/lib/dpkg/lock-frontend - open (11: Resource temporarily unavailable)E: Unable to acquire the dpkg frontend lock (/var/lib/dpkg/lock-frontend), is another process using it?
请运行一下代码解决,并重新执行基础环境安装命令
sudo rm /var/lib/dpkg/lock-frontendsudo rm /var/lib/dpkg/lock
### 重新执行,请确保您不在 deepracer-for-cloud目录中,请回到ubuntu的home目录下cd deepracer-for-cloud && ./bin/prepare.sh
### 重启
sudo reboot
-
Step-3.重新连接EC2实例,并执行第二阶段的环境初始化代码
### 请确保您此时在ubuntu的home目录下
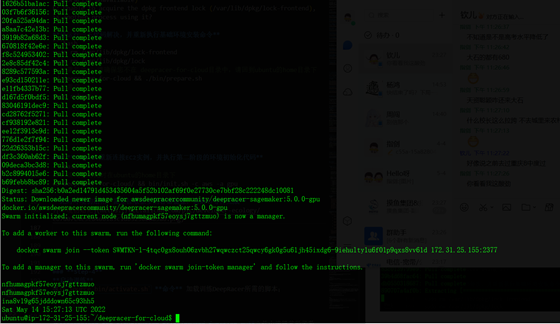
cd deepracer-for-cloud/ && bin/init.sh -c aws -a gpu此时环境初始化,需要拉取很多的容器镜像,请耐心等待完成
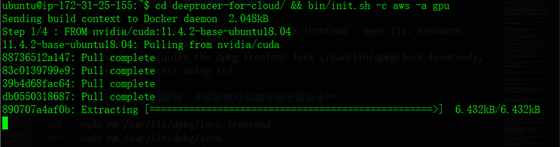
环境初始化完成,如下
-
Step-4.加载训练DeepRacer所需脚本
source bin/activate.sh
-
Step-5.编辑奖励函数,训练信息,车俩信息
在deepracer-for-cloud目录中有一个custom_files目录,里面带有3个文件,分别为:
reward_function.py #奖励函数文件hyperparameters.json #训练信息文件model_metadata.json #车俩信息文件在deepracer-for-cloud/custom_files/reward_function.py文件中编辑奖励函数
def reward_function(params):
'''
Example of penalize steering, which helps mitigate zig-zag behaviors
'''
# Read input parameters
distance_from_center = params['distance_from_center']
track_width = params['track_width']
steering = abs(params['steering_angle']) # Only need the absolute steering angle
# Calculate 3 marks that are farther and father away from the center line
marker_1 = 0.1 * track_width
marker_2 = 0.25 * track_width
marker_3 = 0.5 * track_width
# Give higher reward if the car is closer to center line and vice versa
if distance_from_center <= marker_1:
reward = 1
elif distance_from_center <= marker_2:
reward = 0.5
elif distance_from_center <= marker_3:
reward = 0.1
else:
reward = 1e-3 # likely crashed/ close to off track
# Steering penality threshold, change the number based on your action space setting
ABS_STEERING_THRESHOLD = 15
# Penalize reward if the car is steering too much
if steering > ABS_STEERING_THRESHOLD:
reward *= 0.8
return float(reward)
在deepracer-for-cloud/custom_files/hyperparameters.json文件中编辑训练信息,例如:
{
"batch_size": 64,
"beta_entropy": 0.01,
"discount_factor": 0.995,
"e_greedy_value": 0.05,
"epsilon_steps": 10000,
"exploration_type": "categorical",
"loss_type": "huber",
"lr": 0.0003,
"num_episodes_between_training": 20,
"num_epochs": 10,
"stack_size": 1,
"term_cond_avg_score": 350.0,
"term_cond_max_episodes": 1000,
"sac_alpha": 0.2
}
在deepracer-for-cloud/custom_files/model_metadata.json文件中编辑车辆信息,包括action space、传感器以及神经网络类型等,例如:
{
"action_space": [
{
"steering_angle": -30,
"speed": 0.6
},
{
"steering_angle": -15,
"speed": 0.6
},
{
"steering_angle": 0,
"speed": 0.6
},
{
"steering_angle": 15,
"speed": 0.6
},
{
"steering_angle": 30,
"speed": 0.6
}
],
"sensor": ["FRONT_FACING_CAMERA"],
"neural_network": "DEEP_CONVOLUTIONAL_NETWORK_SHALLOW",
"training_algorithm": "clipped_ppo",
"action_space_type": "discrete",
"version": "3"
}
-
Step-6.编辑环境文件run.env
-
①.添加存储桶信息
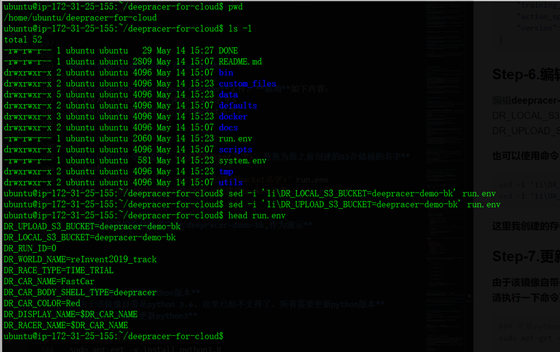
编辑deepracer-for-cloud/run.env文件,添加如下内容:
DR_LOCAL_S3_BUCKET=<创建的bucket名字>DR_UPLOAD_S3_BUCKET=<创建的bucket名字>
也可以使用命令,请将 <创建的bucket名字> 替换为您之前创建的S3存储桶的名字
sed -i '1i\DR_LOCAL_S3_BUCKET=<创建的bucket名字>' run.envsed -i '1i\DR_UPLOAD_S3_BUCKET=<创建的bucket名字>' run.env
这里我创建的存储桶名字为:deepracer-demo-bk,作为演示
-
②.编辑赛道信息
我这里使用的是 re:Invent 2018 赛道,其DR_WORLD_NAME为reinvent_base 请在run.env文件中找到 DR_WORLD_NAME 修改其值
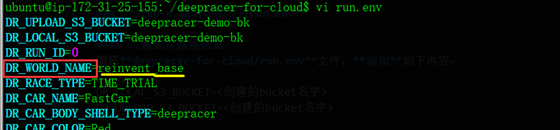
修改赛道信息
-
Step-7.更新python版本
由于该镜像自带是python 3.6,这里已经不支持了,所有需要更新python版本 请执行一下命令更新python3
### 安装python 3.8
sudo apt-get -y install python3.8
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 2

安装python3.8
-
Step-8.更新配置
### 执行如下代码,使此处配置生效
dr-update
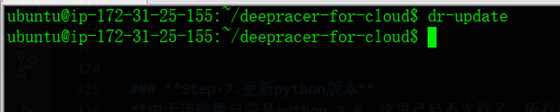
dr-update
-
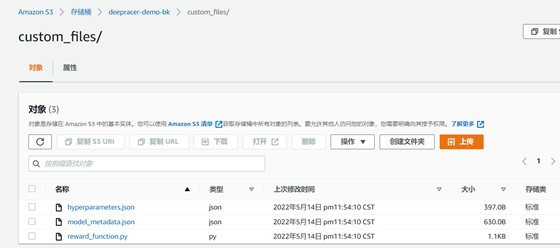
Step-9.上传dr-upload-custom-files到S3存储桶
dr-upload-custom-files

此时S3存储桶中的custom-files应该包含下图文件
-
Step-10.启动训练
执行如下命令开始训练
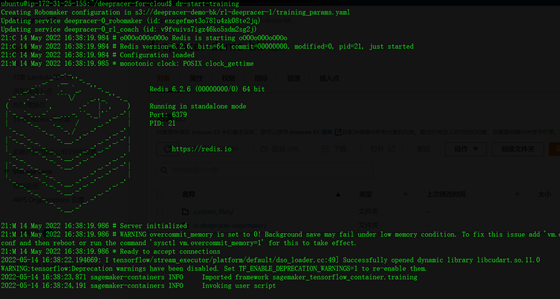
dr-start-training
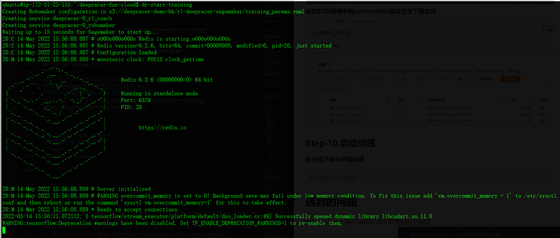
training-1
正常训练如图
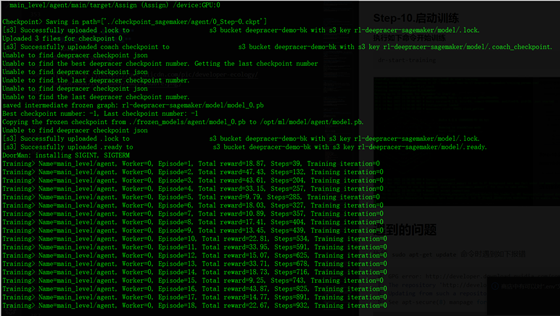
至此,您的模型已经开始在EC2上训练
五、后续操作
1.若实例终止,重新拉取实例,接着上一次训练
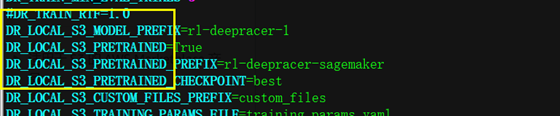
请进行如下操作 #### ①.修改run.env文件 修改如下参数### 这是上一次训练存放文件夹,请查看S3存储桶中的文件夹名称DR_LOCAL_S3_MODEL_PREFIX=<本次训练存放S3存储桶的目录>### 确定培训或评估是否应基于在上一个会话中创建的模型DR_LOCAL_S3_PRETRAINED=True### 设置本次训练的目录DR_LOCAL_S3_PRETRAINED_PREFIX=<上一次训练存放S3存储桶的目录>### 本次训练从上一次训练的checkpoint设置 默认为 lastDR_LOCAL_S3_PRETRAINED_CHECKPOINT=best
这是修改前的

这是修改后的
查看一下s3存储桶的文件

-
②.更新,使本次配置生效
dr-update-env
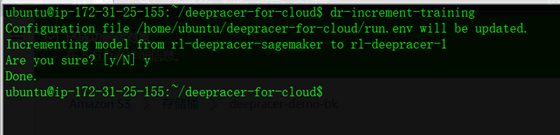
dr-increment-training
-
③.若您修改了 custom_files 中的文件,那么请您再执行如下命令重新上传custom_files
dr-upload-custom-files
-
④.开始训练
dr-start-training
training-again
如果提示 Sagemaker is not running 请执行 dr-start-training -wdr-start-training -w
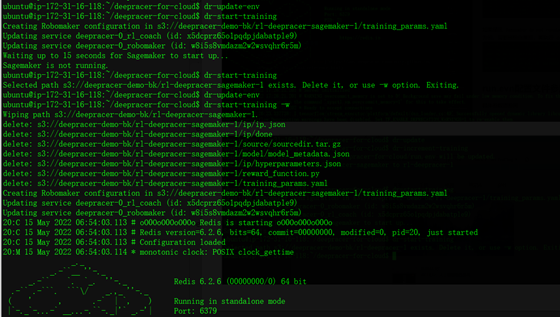
training-again-error-deal-1
run.evn配置文件参数设置,dr-命令释义
具体参数请参阅 Deepracer-for-Cloud GitHub
遇到的问题
1.NO_PUBKEY
W: GPG error: http://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64 Release: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F60F4B3D7FA2AF80E: The repository 'http://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64 Release' is not signed.N: Updating from such a repository can't be done securely, and is therefore disabled by default.N: See apt-secure(8) manpage for repository creation and user configuration details.
处理方案 由于本次使用 ubuntu 18.04 所以使用以下方案解决
wget -qO - http://developer.download.nvidia.com/compute/machine-learning/repos/ubuntu1804/x86_64/7fa2af80.pub | sudo apt-key add -
sudo apt-get update

image.png
2.Python3.6报错,更新python版本
sudo apt-get install python3.8sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 2
注:第一个参数--install表示向update-alternatives注册服务名。
第二个参数是注册最终地址,成功后将会把命令在这个固定的目的地址做真实命令的软链,以后管理就是管理这个软链;
( --install link name path priority)
其中link为系统中功能相同软件的公共链接目录,比如/usr/bin/java(需绝对目录);name为命令链接符名称,如java path为你所要使用新命令、新软件的所在目录 priority为优先级,当命令链接已存在时,需高于当前值,因为当alternative为自动模式时,系统默认启用priority高的链接;# 整数 根据版本号设置的优先级(更改的优先级需要大于当前的)
第三个参数:服务名,以后管理时以它为关联依据。
第四个参数,被管理的命令绝对路径。
第五个参数,优先级,数字越大优先级越高。
3.无法获得锁
E: Could not get lock /var/lib/dpkg/lock-frontend - open (11: Resource temporarily unavailable)E: Unable to acquire the dpkg frontend lock (/var/lib/dpkg/lock-frontend), is another process using it?
解决方法:$ sudo rm /var/lib/dpkg/lock-frontend$ sudo rm /var/lib/dpkg/lock
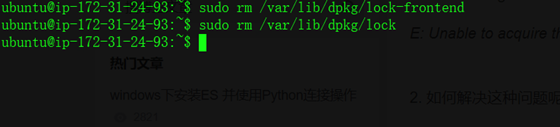
问题3
4.如果提示 Sagemaker is not running 请执行 dr-start-training -w
dr-start-training -w
training-again-error-deal-1
希望这个基础教程可以帮助到您!
标签:训练,S3,创建,Step,Amazon,实例,EC2,DeepRacer,cloud 来源: https://www.cnblogs.com/AmazonwebService/p/16379045.html