谢宝友: 深入理解 Linux RCU 之从硬件说起
作者:互联网
谢宝友: 深入理解 Linux RCU 之从硬件说起
2017-11-09阅读 1.8K0导语: 想要制造出质量可靠的桥梁,就必须真正懂得力学原理。对于想要理解RCU的软件工程师来说,也需要具备一定的硬件基础。
作者简介:谢宝友,在编程一线工作已经有20年时间,其中接近10年时间工作于Linux操作系统。在中兴通讯操作系统产品部工作期间,他作为技术总工参与的电信级嵌入式实时操作系统,获得了行业最高奖----中国工业大奖。
同时,他也是《深入理解并行编程》一书的译者。该书作者Paul E.McKeney是IBM Linux中心领导者,Linux RCU Maintainer。《深入理解RCU》系列文章整理了Paul E.McKeney的相关著作,希望能帮助读者更深刻的理解Linux内核中非常难于理解的模块----RCU。
联系方式: mail:scxby@163.com 微信:linux-kernel
一、来自于霍金的难题
据说斯蒂芬·霍金曾经声称半导体制造商面临两个基本问题:
(1)有限的光速
(2)物质的原子本质
第一个难题,决定了在一个CPU周期内,电信号无法在整个系统所有CPU中广播。换句话说,某个CPU指令对一个内存地址的写操作,不会在这条指令执行完毕后,马上被其他CPU识别到操作结果。例如:CPU0对全局变量foo执行foo = 1,当CPU 0执行完相应的汇编代码后,其他CPU核仍然看到foo赋值前的值。刚接触操作系统的读者,需要注意这一点。
第二个难题,导致我们至少需要一个原子来存储二进制位。没有办法在一个原子中存储一个字、一段内存、一个完整的寄存器内容......最终的结果是,硬件工程师没有办法缩小芯片流片面积。当CPU核心增加时,核间通信的负担会变得更加沉重。
当然,作为理论物理学家,霍金的这两个问题都是理论性的。半导体制造商很有可能已经逼近这两个限制。虽然如此,还是有一些研发报告关注于如何规避这两个基本限制。
其中一个绕开物质原子本质的办法是一种称为“high-K绝缘体”的材料,这种材料允许较大的器件模拟超小型器件的电气属性。这种材料存在一些重大的生产困难,但是总算能将研究的前沿再推进一步。另一个比较奇异的解决方法是在单个电子上存储多个比特位,这是建立在单个电子可以同时存在于多个能级的现象之上。不过这种方法还有待观察,才能确定能否在产品级的半导体设备中稳定工作。
还有一种称为“量子点”的解决方法,使得可以制造体积小得多的半导体设备,不过该方法还处于研究阶段。
第一个限制不容易被绕过,虽然量子技术、甚至弦论,理论上允许通信速度超过光速。但是这仅仅是理论研究,实际工程中还未应用。
二、原子操作有多慢?
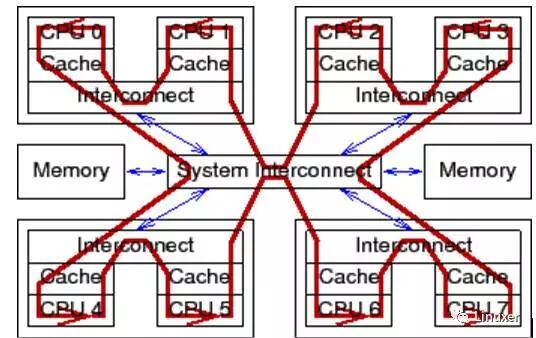
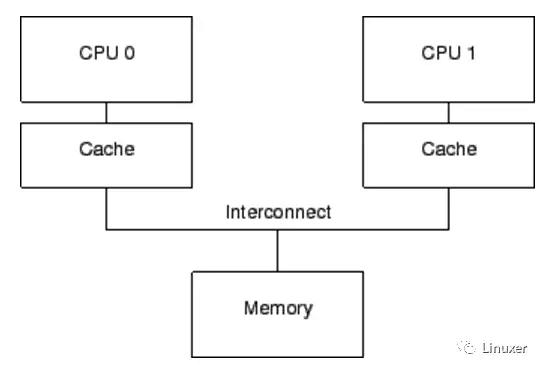
这里的原子操作,是特指Linux内核中,类似于atomic_long_add_return这样的API。简单的说,就是当某个原子操作完成时,确保所有CPU核已经识别到对原子变量的修改,并且在原子操作期间,其他CPU核不会同步对该变量进行修改。这必然要求相应的电信号在所有的CPU之间广播。如下图:
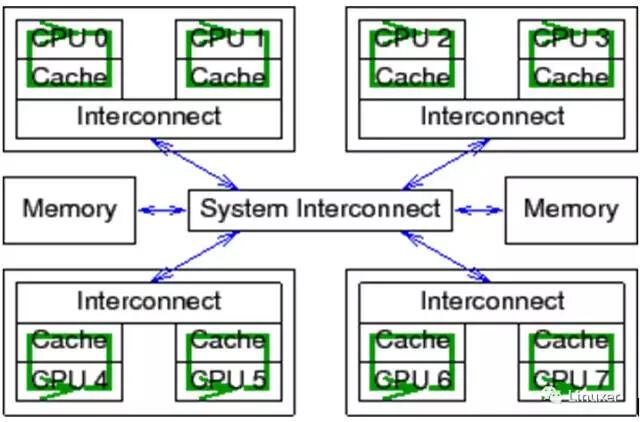
对于普通变量操作(非原子操作)来说,电信号则不必在所有CPU核之间传播并来回传递:
不能忘记一点:Linux操作系统可以运行在超过1024个CPU的大型系统中。在这些大型系统中,在所有CPU之间广播传递电信号,需要花费“很长”的时间。
但是,很长究竟是多长?
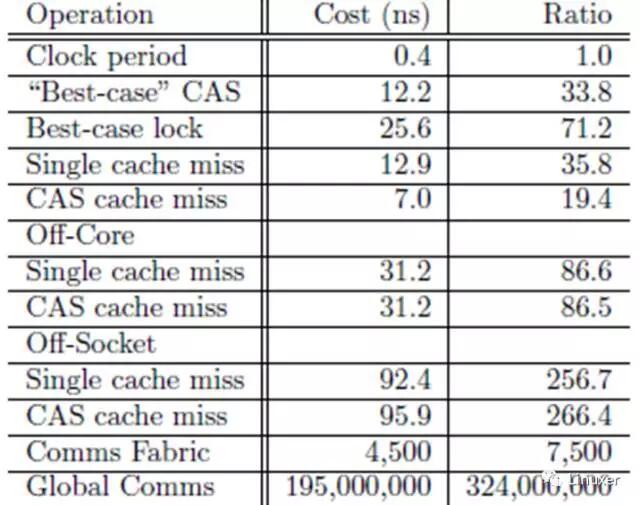
在上表中,一次“CAS cache miss”的CPU周期是266,够长了吧?而这个测试结果,是在比较新的、4核CPU的多核系统中进行的。在老一点的系统中,或者在更多CPU核心的系统中,这个时间更长。
三、变量可以拥有多个值
这不是天方夜谭。
假设CPU 0向全局变量foo写入一个值1,我们会很自然的认为:其他CPU会立即识别到foo的值为1。即使有所疑惑,我们可能也会退一步认为,在稍后某个时刻,其他“所有”CPU都会“同时”识别到foo的值为1。而不会出现一种奇怪的现象:在某个时刻,CPU 1识别到其值为1,而CPU 2识别到其值为0。不幸的是,是时候告别这种想法了。并行计算就是这么神奇和反直觉。如果不能理解这一点,就没办法真正理解RCU。
要明白这一点,考虑下面的代码片段。它被几个CPU并行的执行。第 1行设置共享变量的值为当前CPU的ID,第2行调用gettb()函数对几个值进行初始化,该函数读取硬件时间计数,这个计数值由SOC硬件给出,并且在所有CPU之间共享。当然,这个硬件计数值主要是在power架构上有效,笔者在powerpce500架构上经常使用它。第3-8行的循环,记录变量在当前CPU上保持的时间长度。
1 state.variable = mycpu;
2 lasttb = oldtb = firsttb = gettb();
3 while (state.variable == mycpu) {
4 lasttb = oldtb;
5 oldtb = gettb();
6 if (lasttb - firsttb >1000)
7 break;
8 }
在退出循环前,firsttb 将保存一个时间戳,这是赋值的时间。lasttb 也保存一个时间戳,它是对共享变量保持最后赋予的值时刻的采样值,如果在进入循环前,共享变量已经变化,那么就等于firsttb。
这个数据是在一个1.5GHz POWER5 8核系统上采集的。每一个核包含一对硬件线程。CPU 1、2、3和4记录值,而CPU 0 控制测试。时间戳计数器周期是5.32ns,这对于我们观察缓存状态来说是足够了。
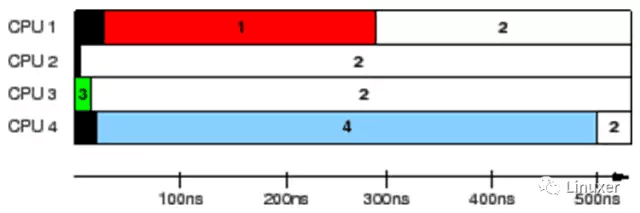
上图的结果,展示出每个CPU识别到变量保持的时间。每一个水平条表示该CPU观察到变量的时间,左边的黑色区域表示相应的CPU第一次计数的时间。在最初5ns期间, 仅仅CPU 3拥有变量的值。在接下来的10ns,CPU 2和3看到不一致的变量值,但是随后都一致的认为其值是“2”。 但是,CPU 1在整个300ns内认为其值是“1”,并且 CPU 4 在整个500ns内认为其值是“4”。
这真是一个匪夷所思的测试结果。同一个变量,竟然在不同的CPU上面被看到不同的值!!!!
如果不理解硬件,就不会接受这个匪夷所思的测试结果。当然了,此时如果有一位大师站在你的面前,你也不能够跟随大师的节奏起舞。
四、为什么需要MESI
请不要说:我还不知道MESI是什么?
简单的说,MESI是一种内存缓存一致性协议。
现代CPU的速度比现代内存系统的速度快得多。2006 年的CPU可以在每纳秒内执行十条指令。但是需要很多个十纳秒才能从物理内存中取出一个数据。它们的速度差异(超过2个数量级)导致在现代CPU中出现了数兆级别的缓存。这些缓存与CPU是相关联的,如下图。典型的,缓存可以在几个时钟周期内被访问。借助于CPU流水线的帮助,我们暂且可以认为,缓存能够抵消内存对CPU性能的影响。
CPU缓存和内存之间的数据流是固定长度的块,称为“缓存行”,其大小通常是2的N次方。范围从16到256字节不等。当一个特定的数据第一次被CPU访问时,它在缓存中还不存在,这称为“cache miss”(或者可被更准确的称为“startup cache miss”或者“warmupcache miss”)。“cache miss”意味着:CPU在从物理内存中读取数据时,它必须等待(或处于“stalled”状态) 数百个CPU周期。但是,数据将被装载入CPU缓存以后,后续的访问将在缓存中找到,因此可以全速运行。
经过一段时间后,CPU的缓存将会被填满,后续的缓存缺失需要换出缓存中现有的数据,以便为最近的访问项腾出空间。这种“cache miss”被称为“capacitymiss”,因为它是由于缓存容量限制而造成的。但是,即使此时缓存还没有被填满,大量缓存也可能由于一个新数据而被换出。这是由于大量的缓存是通过硬件哈希表来实现的,这些哈希表有固定长度的哈希桶(或者叫“sets”,CPU设计者是这样称呼的),如下图。
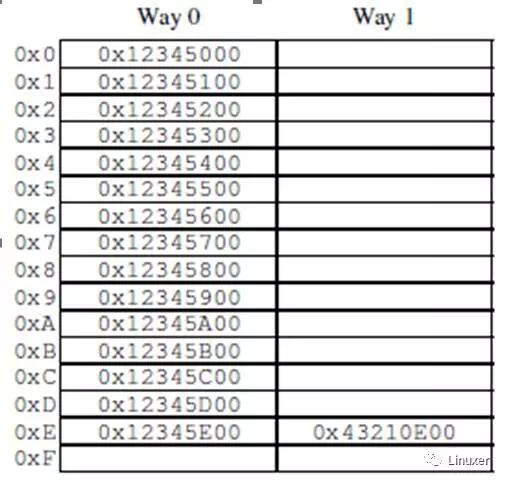
这个缓存有16个“sets”和2“路”,共32个“缓存行”,每个节点包含一个256字节的“缓存行”,它是一个256字节对齐的内存块。这个缓存行稍微显得大了一点,但是这使得十六进制的运行更简单。从硬件的角度来说,这是一个两路组相联缓存,类似于带16个桶的软件哈希表,每个桶的哈希链最多有两个元素。大小 (本例中是32个缓存行) 和相连性 (本例中是2) 都被称为缓存的“geometry”。由于缓存是硬件实现的,哈希函数非常简单:从内存地址中取出4位(哈希桶数量)作为哈希键值。
在程序代码位于地址0x43210E00- 0x43210EFF,并且程序依次访问地址0x12345000-0x12345EFF时,图中的情况就可能发生。假设程序正准备访问地址0x12345F00,这个地址会哈希到 0xF行,该行的两路都是空的,因此可以提供对应的256字节缓存行。如果程序访问地址0x1233000,将会哈希到第0行,相应的256字节缓存行可以放到第1路。但是,如果程序访问地址0x1233E00,将会哈希到第0xE行,必须有一个缓存行被替换出去,以腾出空间给新的行。如果随后访问被替换的行,会产生一次“cache miss”,这样的缓存缺失被称为“associativitymiss”。
更进一步说,我们仅仅考虑了读数据的情况。当写的时候会发生什么呢?由于在一个特定的CPU写数据前,让所有CPU都意识到数据被修改这一点是非常重要的。因此,它必须首先从其他CPU缓存中移除,或者叫“invalidated”(使无效)。一旦“使无效”操作完成,CPU可以安全的修改数据项。如果数据存在于该CPU缓存中,但是是只读的,这个过程称为“write miss”。一旦某个特定的CPU使其他CPU完成了“使无效”操作,该CPU可以反复的重新写(或者读)数据。
最后,如果另外某个CPU试图访问数据项,将会引起一次缓存缺失,此时,由于第一个CPU为了写而使得缓存项无效,这被称为“communication miss”。因为这通常是由于几个CPU使用缓存通信造成的(例如,一个用于互斥算法的锁使用这个数据项在CPU之间进行通信)。
很明显,所有CPU必须小心的维护数据的一致性视图。这些问题由“缓存一致性协议”来防止,常用的缓存一致性是MESI。
五、MESI的四种状态
MESI 存在“modified”,“exclusive”,“shared”和“invalid”四种状态,协议可以在一个指定的缓存行中应用这四种状态。因此,协议在每一个缓存行中维护一个两位的状态标记,这个标记附着在缓存行的物理地址和数据后面。
处于“modified”状态的缓存行是由于相应的CPU最近进行了内存存储。并且相应的内存确保没有在其他CPU的缓存中出现。因此,“modified”状态的缓存行可以被认为被CPU所“拥有”。由于该缓存保存了“最新”的数据,因此缓存最终有责任将数据写回到内存,也应当为其他缓存提供数据,并且必须在缓存其他数据之前完成这些事情。
“exclusive”状态非常类似于“modified”状态,唯一的差别是该缓存行还没有被相应的CPU修改,这也表示缓存行中的数据及内存中的数据都是最新的。但是,由于CPU能够在任何时刻将数据存储到该行,而不考虑其他CPU,因此,处于“exclusive”状态也可以认为被相应的CPU所“拥有”。也就是说,由于物理内存中的值是最新的,该行可以直接丢弃而不用回写到内存,也不用通知其他CPU。
处于“shared”状态的缓存行可能已经被复制到至少一个其他CPU的缓存中,这样在没有得到其他CPU的许可时,不能向缓存行存储数据。与“exclusive”状态相同,此时内存中的值是最新的,因此可以不用向内存回写值而直接丢弃缓存中的值,也不用通知其他CPU。
处于“invalid”状态的行是空的,换句话说,它没有保存任何有效数据。当新数据进入缓存时,它被放置到一个处于“invalid”状态的缓存行。这个方法是比较好的,因为替换其他状态的缓存行将引起大量的缓存缺失。
由于所有CPU必须维护缓存行中的数据一致性视图,因此缓存一致性协议提供消息以标识系统中缓存行的动作。
六、MESI消息
MESI协议需要在CPU之间通信。如果CPU在单一共享总线上,只需要如下消息就足够了:
- 读消息:“读”消息包含要读取的缓存行的物理地址。
- 读响应消息:“读响应”消息包含较早前的“读”消息的数据。这个“读响应”消息可能由物理内存或者其他CPU的缓存提供。例如,如果一个缓存处于“modified”状态,那么,它的缓存必须提供“读响应”消息。
- 使无效消息:“使无效”消息包含要使无效的缓存行的物理地址。其他的缓存必须从它们的缓存中移除相应的数据并且响应此消息。
- 使无效应答:一个接收到“使无效”消息的CPU必须在移除指定数据后响应一个“使无效应答”消息。
- 读使无效:“读使无效”消息包含缓存行要读取的物理地址。同时指示其他缓存移除数据。因此,它同时包含一个“读”消息和一个“使无效”消息。“读使无效”消息同时需要“读响应”消息以及“使无效应答”消息进行答应。
- 写回:“写回”消息包含要回写到物理内存的地址和数据。(并且也许会“探测”其他CPU的缓存)。这个消息允许缓存在必要时换出处于“modified”状态的数据以腾出空间。
再次重申,所有这些消息均需要在CPU之间传播电信号,都面临霍金提出的那两个IT难题。
七、MESI状态转换
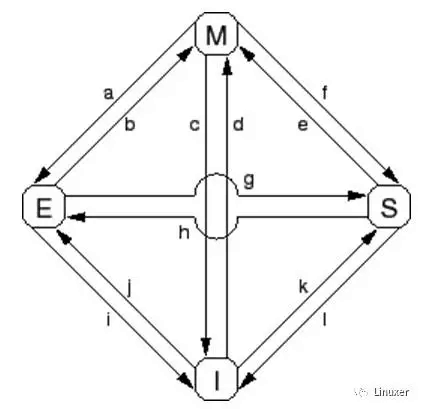
- Transition (a):缓存行被写回到物理内存,但是CPU仍然将它保留在缓存中,并在以后修改它。这个转换需要一个“写回”消息。
- Transition (b):CPU将数据写到缓存行,该缓存行目前处于排它访问。不需要发送或者接收任何消息。
- Transition (c):CPU收到一个“读使无效”消息,相应的缓存行已经被修改。CPU必须使无效本地副本,然后响应“读响应”和 “使无效应答”消息,同时发送数据给请求的CPU,标示它的本地副本不再有效。
- Transition (d):CPU进行一个原子读—修改—写操作,相应的数据没有在它的缓存中。它发送一个“读使无效”消息,通过“读响应”消息接收数据。一旦它接收到一个完整的“使无效应答”响应集合,CPU就完成此转换。
- Transition (e):CPU进行一个原子读—修改—写操作,相应的数据在缓存中是只读的。它必须发送一个“使无效”消息,并等待“使无效应答”响应集合以完成此转换。
- Transition (f):其他某些CPU读取缓存行,其数据由本CPU提供,本CPU包含一个只读副本。数据只读的原因,可能是由于数据已经回写到内存中。这个转换开始于接收到一个“读”消息,最终本CPU响应了一个“读响应” 消息。
- Transition (g):其他CPU读取数据,并且数据是从本CPU的缓存或者物理内存中提供的。无论哪种情况,本CPU都会保留一个只读副本。这个事务开始于接收到一个“读”消息,最终本CPU响应一个“读响应”消息。
- Transition (h):当前CPU很快将要写入一些数据到缓存行,于是发送一个“使无效”消息。直到它接收到所有“使无效应答”消息后,CPU才完成转换。可选的,所有其他CPU通过“写回”消息将缓存行的数据换出(可能是为其他缓存行腾出空间)。这样,当前CPU就是最后一个缓存该数据的CPU。
- Transition (i):其他某些CPU进行了一个原子读—修改—写操作,相应的缓存行仅仅被本CPU持有。本CPU将缓存行变成无效状态。这个转换开始于接收到“读使无效”消息,最终本CPU响应一个“读响应”消息以及一个“使无效应答”消息。
- Transition (j):本CPU保存一个数据到缓存行,但是数据还没有在它的缓存行中。因此发送一个“读使无效”消息。直到它接收到“读响应”消息以及所有“使无效应答”消息后,才完成事务。缓存行可能会很快转换到“修改”状态,这是在存储完成后由Transition (b)完成的。
- Transition (k):本CPU装载一个数据,但是数据还没有在缓存行中。CPU发送一个“读”消息,当它接收到相应的“读响应”消息后完成转换。
- Transition (l):其他CPU存储一个数据到缓存行,但是该缓存行处于只读状态(因为其他CPU也持有该缓存行)。这个转换开始于接收到一个“使无效”消息,当前CPU最终响应一个“使无效应答”消息。
文章来源于微信公众号 Linuxer (ID:linuxdev)
标签:缓存,RCU,无效,消息,Linux,谢宝友,数据,CPU,内存 来源: https://www.cnblogs.com/cx2016/p/14025185.html